Lower limb joint structure of rehabilitation robot
A rehabilitation robot and joint structure technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of lack of safety limit, hidden danger of patient safety, lack of sensors, etc., to improve safety, avoid injury, and improve accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
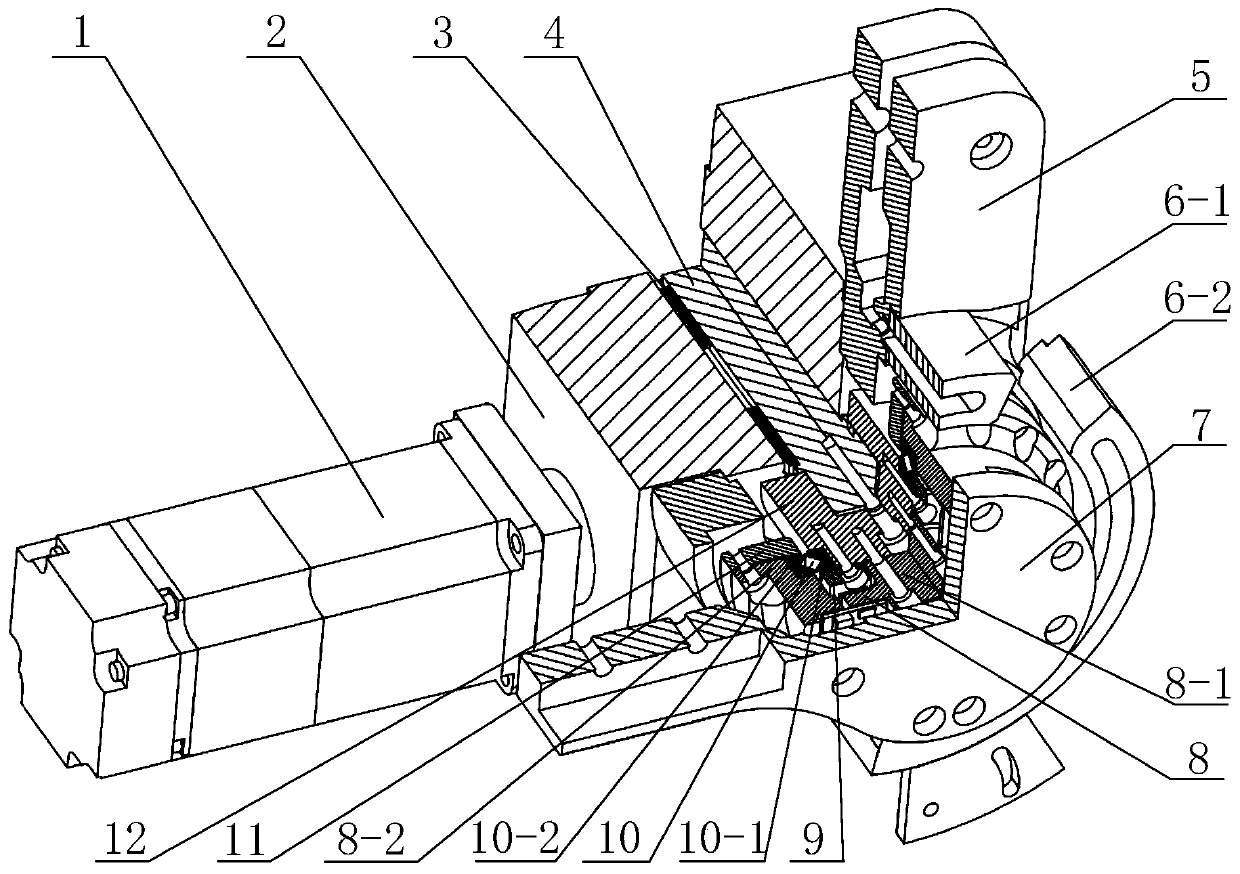
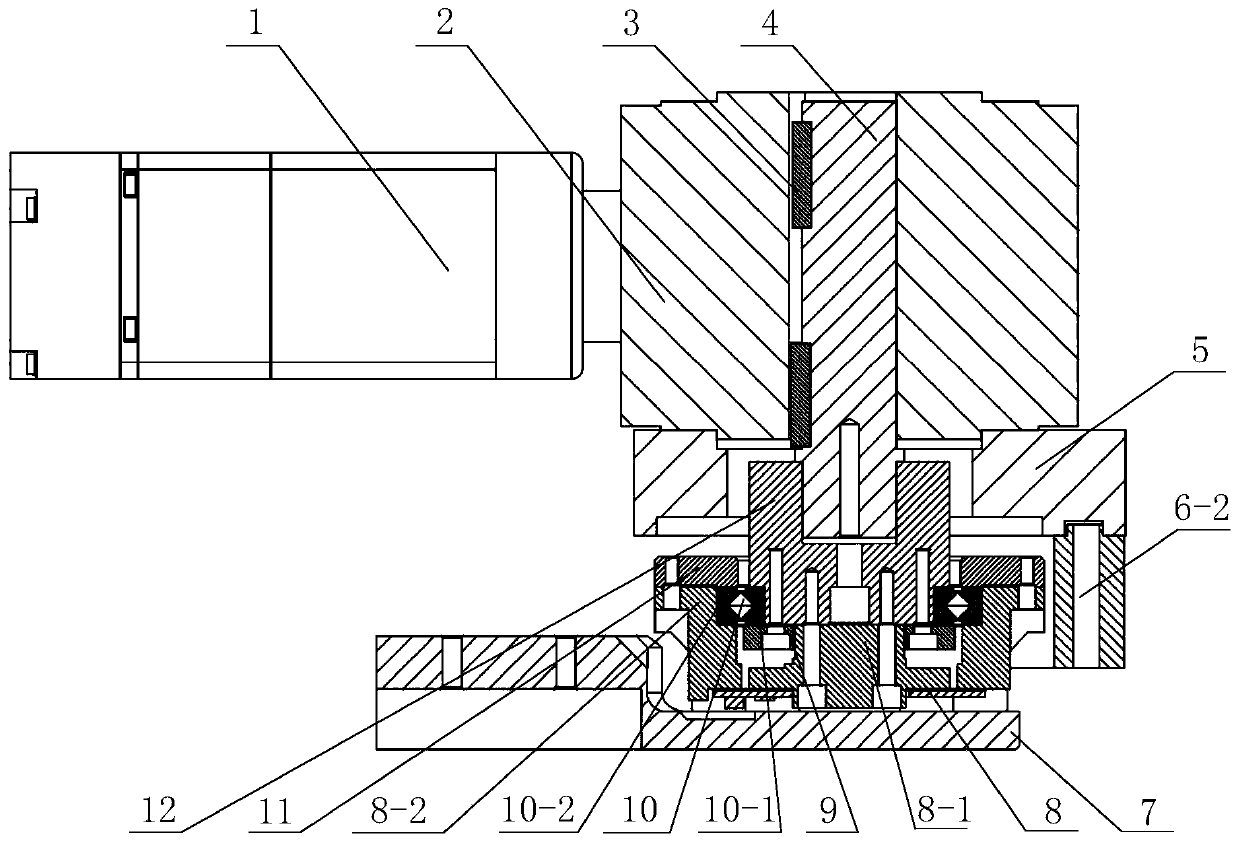
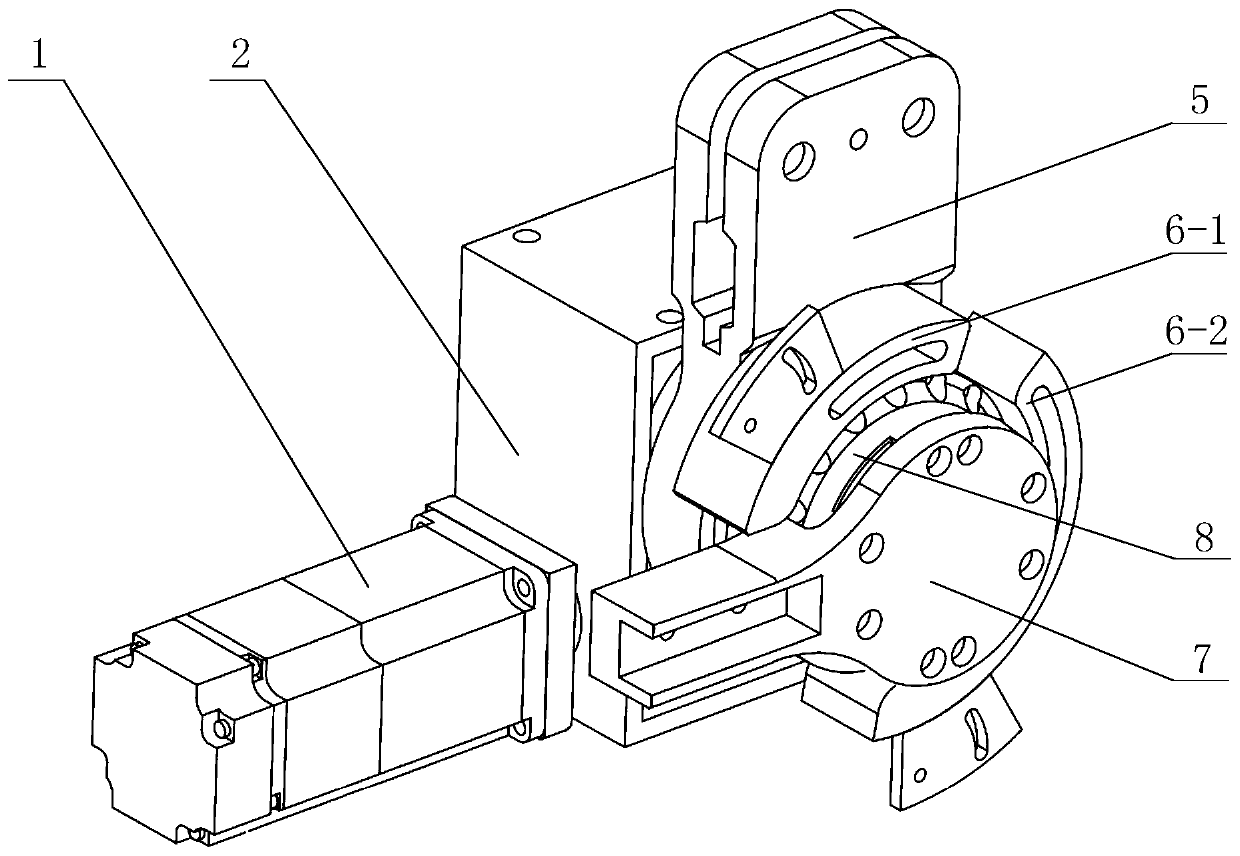
[0024] Please refer to the structural schematic diagram of the lower limb joint structure of a gait training rehabilitation robot of the present invention Figure 1-Figure 2 A lower limb joint structure of a rehabilitation robot at least includes a drive part, a torque sensor part, a safety limit part and an output part.
[0025] The reducer 2 of the driving part is installed on the reducer flange 5 through bolt connection to realize the fixation of the reducer, and the reducer flange 5 can be connected with other joints, legs and bed frame to realize joint fixation The motor 1 is connected to the reducer 2 through the motor flange 13, one end of the motor flange 13 is connected to the motor 1, and the other end is connected to the reducer 2 shell, so that the motor 1 drives the reducer 2; the reducer 2 passes two keys 3 It is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com