Moving robot trajectory tracking control method based on event trigger
A mobile robot and event-triggered technology, which is used in the control of finding targets, program-controlled manipulators, manipulators, etc., to save network bandwidth resources, improve utilization, and reduce sampling times.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0083] 1) Establish the error dynamic equation of the system
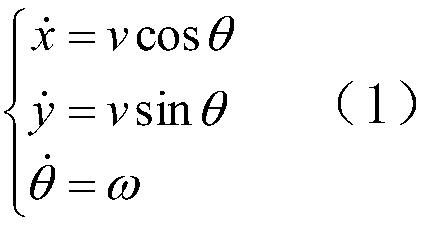
[0084] First establish the motion equation of the mobile robot:
[0085]
[0086] Where (x, y) is the coordinate of the mobile robot in the Cartesian coordinate system, θ is the angle between the robot’s motion direction and the positive direction of the x-axis, and (v, ω) is the control input vector.
[0087] The dynamic equation of the reference robot is:
[0088]
[0089] where (x r ,y r ) is the coordinates of the reference robot in the Cartesian coordinate system, θ r is the angle between the motion direction of the reference robot and the positive direction of the x-axis, (v r ,ω r ) is the control input vector of the reference robot.
[0090] The error coordinate system is introduced as follows:
[0091]
[0092] According to equations (1)-(3), the dynamic equation of system tracking error can be obtained as
[0093]
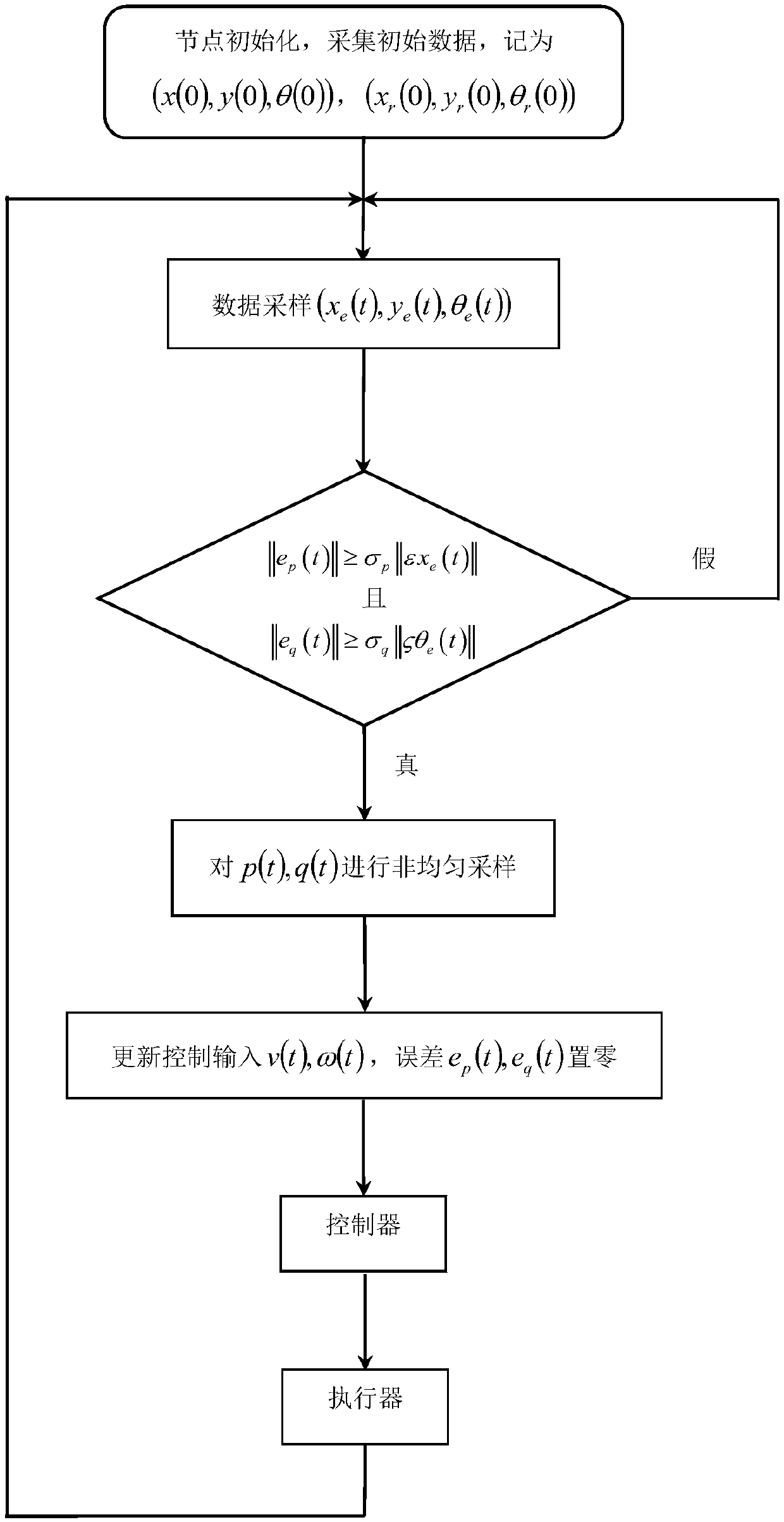
[0094] 2) Controller design, measurement error definition
[0095] In...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com