Variable-rigidity flexible mechanical arm module and control method thereof
A software machine, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to achieve complex environments, high cost of Hall sensors, and a large number of required, to improve work efficiency and control accuracy. , the structure is simple, the effect of efficient control of the problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
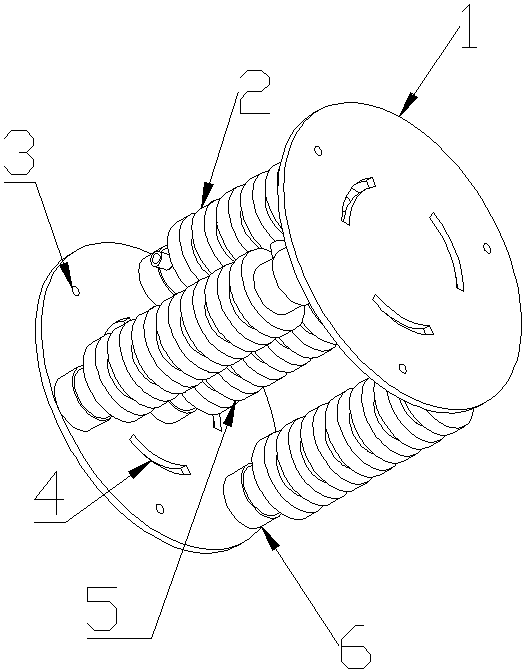
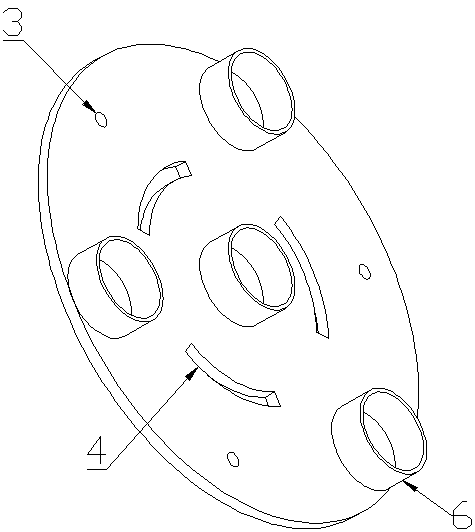
[0036] The soft manipulator module with variable stiffness of the present invention, such as figure 1As shown, it includes two connecting plates (1) located on both sides, and a plurality of silicone airbags (2) are connected between the two connecting plates (1), and the plurality of silicone airbags (2) include the connecting plate (1) ) middle part is used to produce the variable stiffness silicone airbags of antagonistic effect and several curved silicone airbags uniformly distributed on the periphery of the connecting plate (1) to control the deformed shape, each silicone airbag (2) is connected with a trachea, and the connecting plate (1) ) is provided with a pipeline passing hole (4) for allowing the trachea to pass through. In this embodiment, there are four silicone airbags (2), including one variable-stiffness silicone airb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com