


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An attitude optimization solution method for bionic navigation
An attitude and optimal technology, applied in navigation calculation tools, navigation, surveying and navigation, etc., can solve the problems of reduced accuracy of navigation and attitude calculation, blurred polarization azimuth, and enhanced inconsistency, avoiding the problem of angle ambiguity, Reduce the requirement of operation speed and make up for the effect of poor dynamics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] Example 1 is a static experiment. The experimental location of this experiment is outside the School of Mechanical Engineering, Dalian University of Technology. The geographical location information is 121.527° east longitude and 38.879° north latitude. The experiment time is 17:40 pm on May 28, 2018 , the weather was clear and cloudless. By checking the astronomical almanac, we can know that the solar altitude angle at this time is 17.04°, and the solar azimuth angle is -104.18°. The polarized light navigation experiment platform is placed statically for about 220 seconds. By collecting the output data of the gyroscope, the polarized light sensor and the accelerometer, the system stability of the algorithm of the present invention under static conditions is verified.
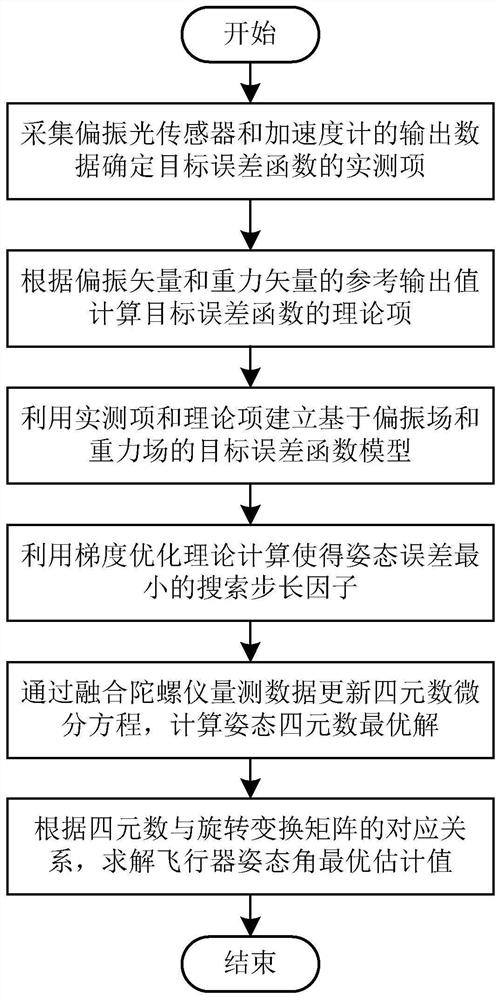
[0037] in the attached figure 1 The calculation flowchart of the attitude solving method of the present invention is shown in , and the specific steps are as follows:
[0038] Step 1: Collect the output...
Embodiment 2
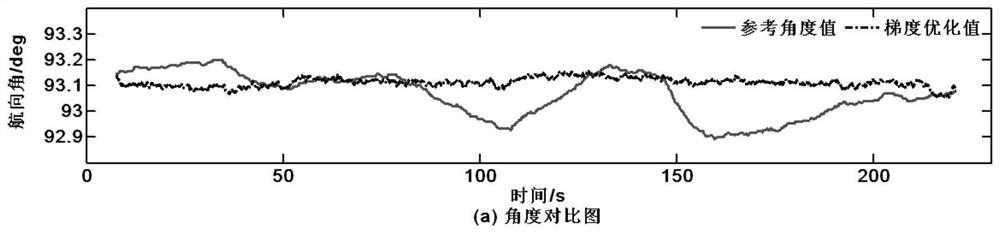
[0056] Example 2 is a dynamic experiment. The experimental location of this experiment remains unchanged. The experimental time is 18:00 on June 12, 2018. The weather is clear and cloudless. By querying the astronomical calendar, it can be known that the solar altitude angle at this time is 14.29°. The azimuth of the sun is -108.42°, and the polarized light navigation experiment platform is tilted and rotated three-dimensionally. By collecting the output data of the gyroscope, the polarized light sensor and the accelerometer, the dynamic tracking performance of the algorithm of the present invention under the motion condition is verified. The implementation process of Example 2 is consistent with the steps of Example 1, and different experimental parameters have been described above.
[0057] Figure 4 shows the comparison curve of the heading angle and the real-time change curve of the search step value. Figure 4a The reference value in is the calculated value of the Kalman ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com