An identification method of geometric parameters of industrial robots based on transformation matrix error model
An industrial robot, transformation matrix technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of large impact on production capacity and efficiency of production lines, and achieve the goal of improving end positioning accuracy, efficiency, and measurement accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in further detail now in conjunction with accompanying drawing.
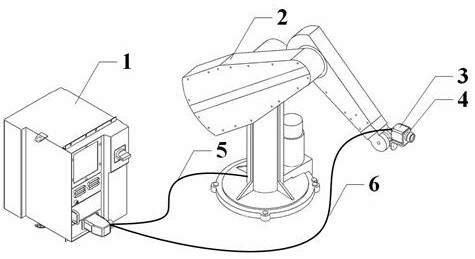
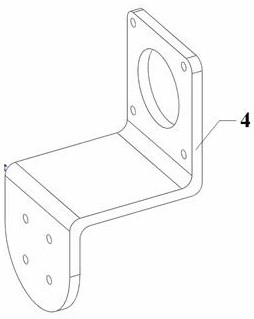
[0037] Such as figure 1 and figure 2 As shown, a method for identifying geometric parameters of an industrial robot based on a transformation matrix error model. The structure of an industrial robot includes a robot control cabinet 1, an industrial robot 2, an intelligent industrial camera 3, a camera mounting frame 4, a control signal communication cable 5 and a transmission signal communication Cable 6, the intelligent industrial camera 3 is fixedly installed at the end of the industrial robot 2 through the camera mounting frame 4, the industrial robot 2 is connected to the robot control cabinet 1 through the control signal communication cable 5, and the intelligent industrial camera 3 It is connected with the robot control cabinet 1 through the signal transmission communication cable 6 .
[0038] In this embodiment, a processor capable of processing and sending sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com