A terminal error correction system and method for a three-degree-of-freedom parallel robot
A robot system and error correction technology, applied in the field of robots, can solve problems such as limiting the application range of error correction methods, and achieve the effect of easy-to-use terminal error correction system and method, ensuring positioning accuracy, and avoiding disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046]In order to further illustrate the purpose, technical solutions and advantages of the present invention, the present invention will be further described in detail below with reference to specific embodiments and accompanying drawings.
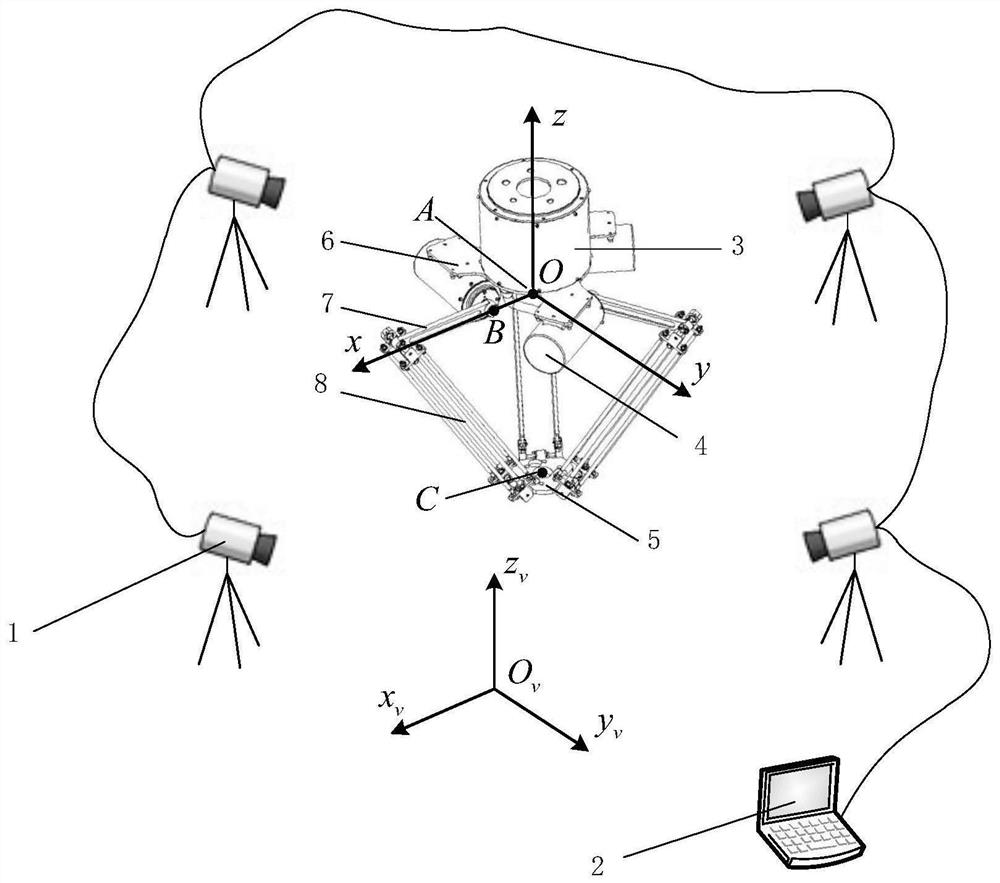
[0047] like figure 1 As shown, the three-degree-of-freedom parallel robot includes an electronic cabin 3, a moving platform 5, a static platform 6, and three symmetrically arranged branch chains (also called "parallel mechanisms"), each of which contains a Arm servo 4, active arm 7 and driven arm 8.
[0048] When the parallel robot moves, the three arm servos drive the three active arms connected to it to rotate, which in turn drives the three slave arms to move, so that the moving platform 5 produces translation in the three-dimensional space. The motion space of the moving platform is the cylindrical space.
[0049] The visual positioning camera 1 adopts a CCD camera with an infrared light source, and the passive reflective targets A,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com