


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
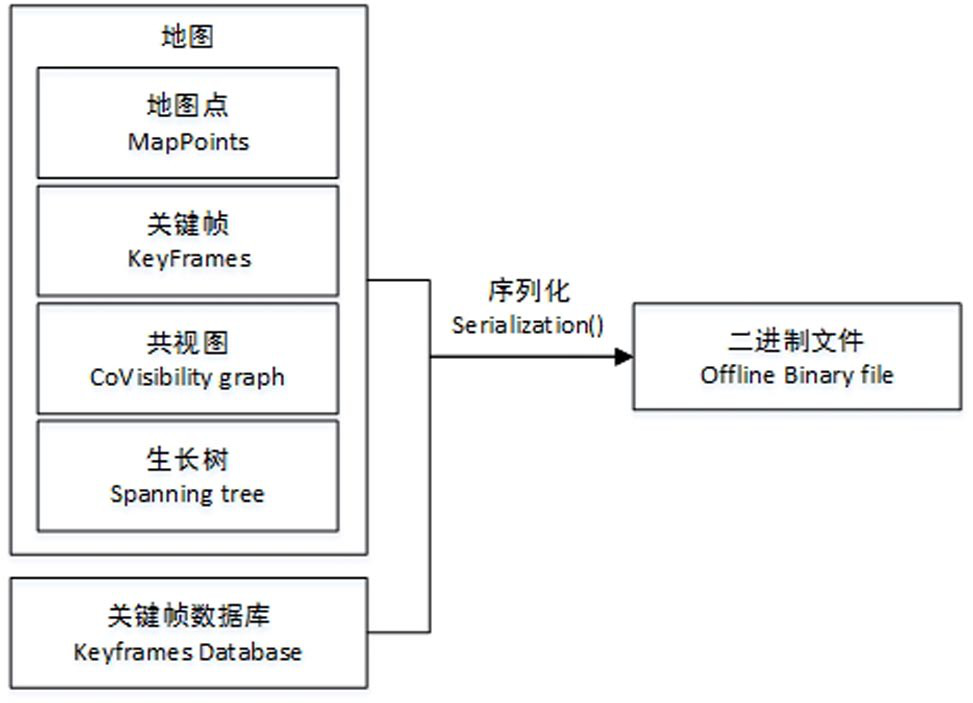
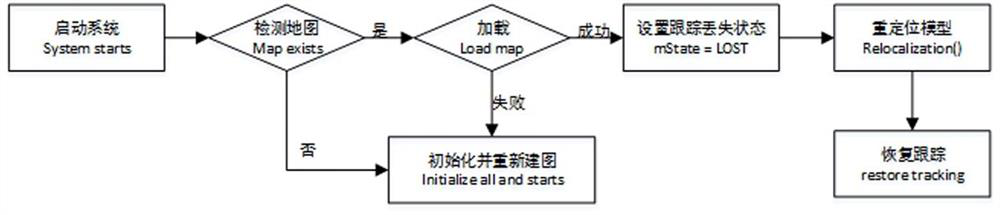
Offline map preservation and real-time relocation method for mobile robot
A mobile robot and offline map technology, applied in the field of mobile robots, can solve the problems of poor human-computer interaction, no offline visualization, and no real-time attention, and achieve the effect of improving robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0056] 1. ORB-SLAM2
[0057] ORB-SLAM2 was proposed by RMur-Artal et al. in 2017. It is an improved version of ORB-SLAM. On the basis of monocular, it adds support for binocular and RGB-D cameras. It is a complete visual SLAM solution. The system framework of ORB-SLAM2 mainly includes three parallel threads: Tracking, Local Mapping, and Loop Closing.
[0058] 1.1 Tracking
[0059] The main task of the tracking thread is to extract ORB features and estimate the camera pose for each frame of input image. Due to factors such as environmental changes or violent camera movements, the tracking state will change at any time. In order to ensure the robustness of the system, the tracking thread will switch between three tracking models according to different situations: motion model, reference frame model, and relocation model , the input data of each tracking model is different, but the goal is to solve the initial camera pose. PnP (Perspective-n-Point) is the main pose estimation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com