Driver lane change intention identification method based on hidden Markov model
A recognition method and a driver's technology, applied in the field of recognition of drivers' lane-changing intentions based on hidden Markov models, can solve problems such as distrust and large differences in driverless machines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] 1. Establishment of lane-changing intention recognition model
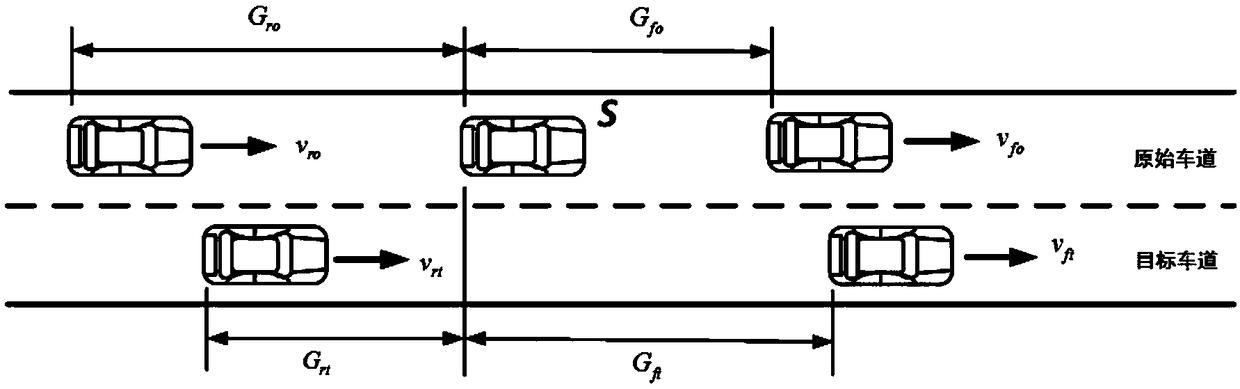
[0031] In order to identify the current driving behavior, by analyzing the characteristics and rules of the vehicle in the lane-changing phase, the speed of the lane-changing vehicle, the inter-vehicle distance and speed difference between the lane-changing vehicle and the front and rear vehicles in the original lane, and the target vehicle and the front and rear vehicles are selected as Observing the state parameters, and selecting lane change and going straight as the implicit state parameters, a recognition model of the driver's lane change intention is established by using the observed state to obtain the implicit state. as follows figure 1 A schematic diagram of a lane-changing vehicle is shown. where G fo is the straight-line distance between the lane-changing vehicle S and the vehicle in front of the lane-changing vehicle; G ro is the straight-line distance between the lane-changing vehicle S and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com