Method and device for controlling flight of unmanned aerial vehicle
A technology for unmanned aerial vehicles and control parameters, applied in the field of unmanned aerial vehicles, can solve the problem of low accuracy of target following, and achieve the effect of solving low accuracy, improving accuracy and realizing precise following.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0054] The first aspect of the embodiments of the present invention provides a method for controlling the flight of a drone. Please refer to figure 1 , Is a flowchart of a method for controlling the flight of a drone in an embodiment of the present invention. The method includes:
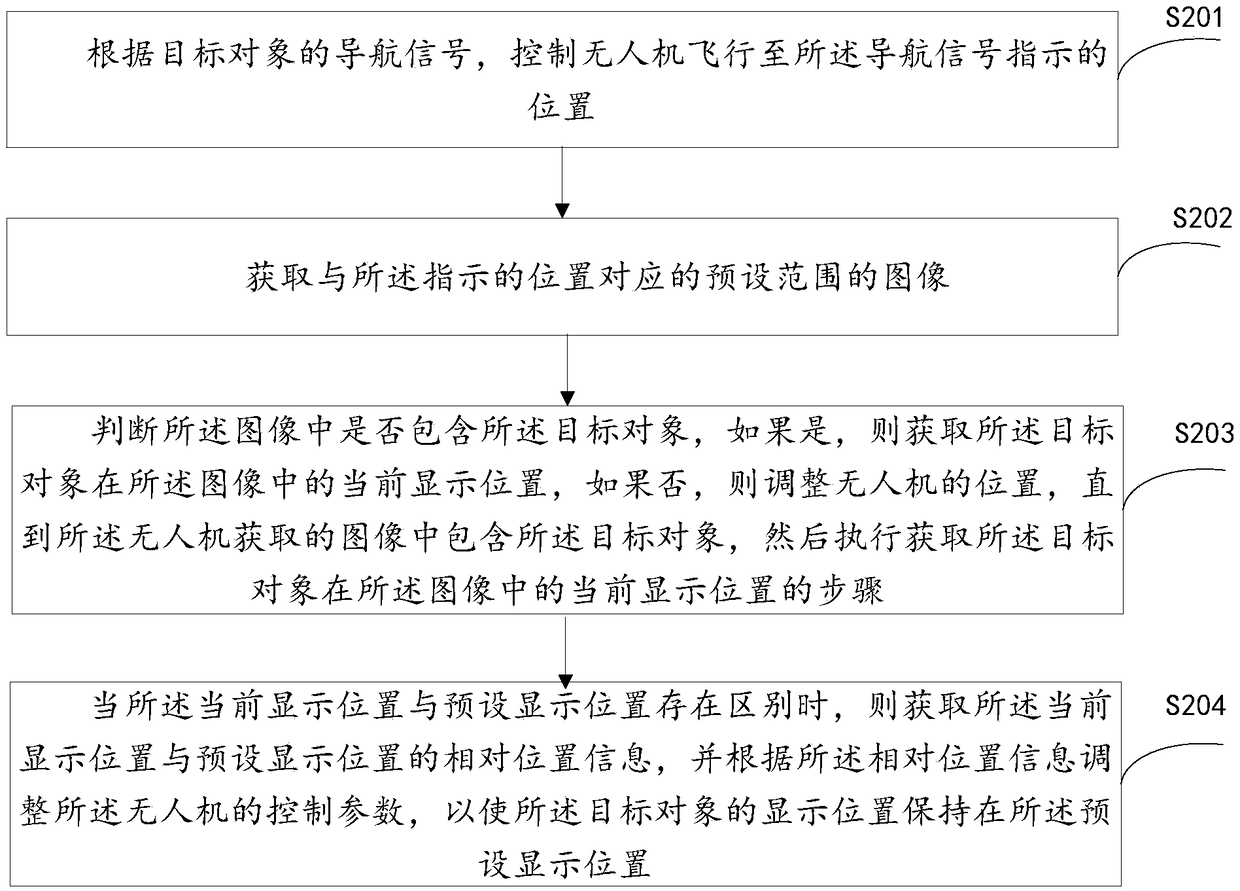
[0055] First, step S101 is performed: according to the primary navigation signal of the target object, the drone is controlled to fly to the position indicated by the primary navigation signal.
[0056] It should be noted that the "primary navigation signal" here refers to the navigation signal of the target object acquired for the first time. The basic target object mentioned in the following refers to the real target object that has not yet been determined whether it is the real target object that needs to be followed, and the standard target object is the real target object that has been determined to be the real target object that needs to be followed. In order to accurately track the target object ...
Embodiment 2
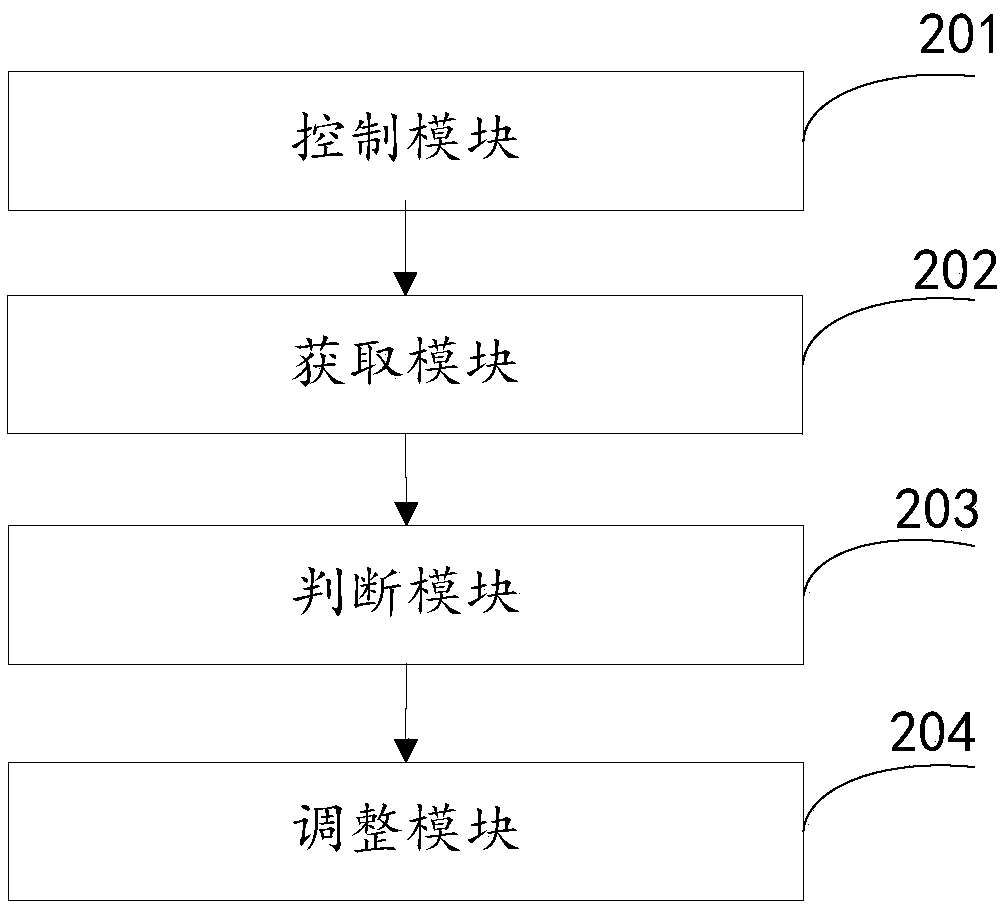
[0093] Based on the same inventive concept as the method for controlling drone flight in the aforementioned first aspect, the second embodiment of the present invention also provides a control device for drone following, such as figure 2 Shown, including:
[0094] The control module 201 is used to control the drone to fly to the position indicated by the navigation signal according to a navigation signal of the target object;
[0095] The acquiring module 202 is configured to acquire an image of a preset range corresponding to the indicated position;
[0096] The determining module 203 is configured to determine whether the target object is included in the image, and if so, obtain the current display position of the target object in the image;
[0097] The adjustment module 204 is configured to, when there is a difference between the current display position and the preset display position, obtain the relative position information between the current display position and the preset di...
Embodiment 3
[0107] Based on the same inventive concept as the method for controlling the flight of a drone in the first embodiment, the third embodiment of the present invention also provides a computer-readable storage medium, such as image 3 As shown, a computer program is stored thereon, and the following steps are implemented when the program is executed by the processor:
[0108] According to a navigation signal of the target object, control the drone to fly to the position indicated by the navigation signal;
[0109] Acquiring an image of a preset range corresponding to the indicated position;
[0110] Determine whether the target object is included in the image, and if so, obtain the current display position of the target object in the image;
[0111] When there is a difference between the current display position and the preset display position, the relative position information between the current display position and the preset display position is acquired, and the control parameters of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com