Finite time multi-mode sliding mode attitude control algorithm of flexible spacecraft
A flexible spacecraft, limited time technology, applied in attitude control, adaptive control, general control system and other directions, can solve the problem that the system cannot be guaranteed for limited time stability, and achieve the effect of eliminating influence and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
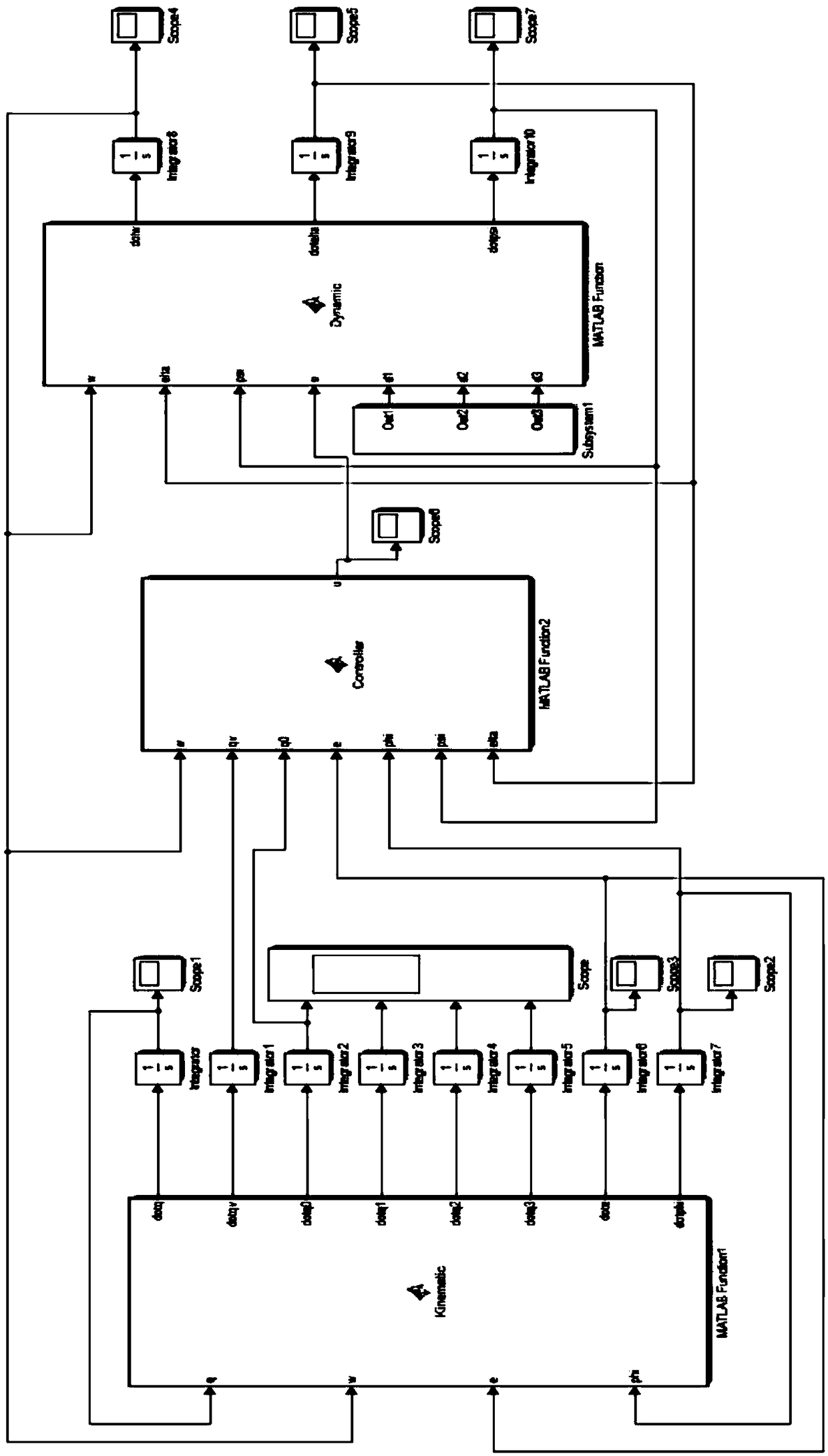
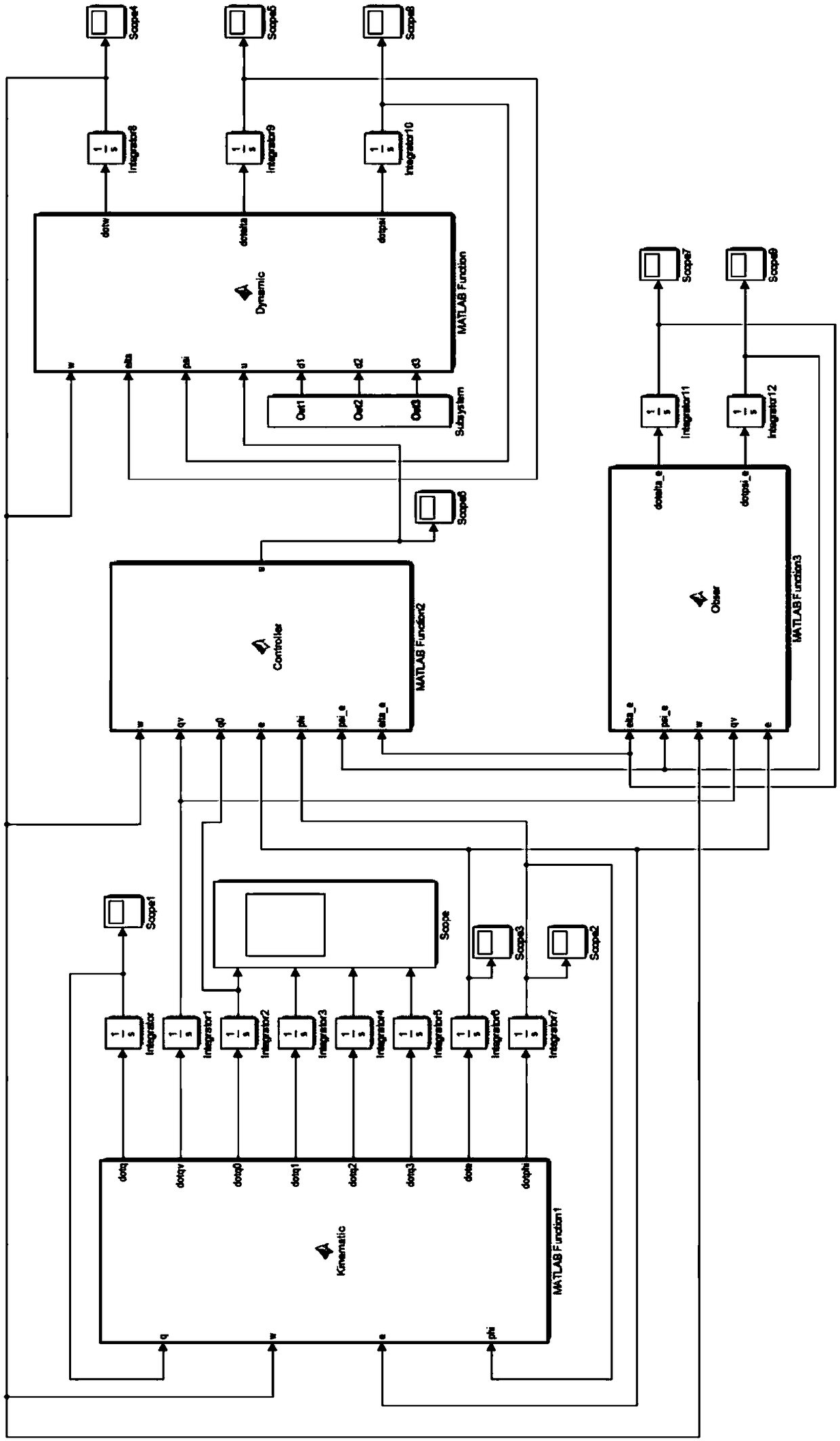
[0036] like Figure 1 to Figure 2 Shown, the finite-time multimodal sliding mode attitude control algorithm of the flexible spacecraft of the present invention includes:
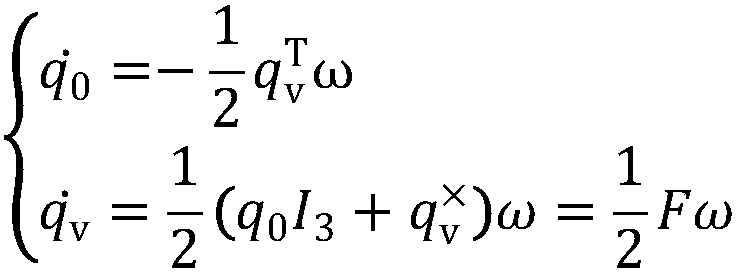
[0037] First, based on the attitude quaternion and the Euler axis / angle, the following kinematic equations and dynamic equations are established for the flexible spacecraft with bounded external disturbance moments and uncertain moments of inertia:
[0038]
[0039]
[0040]
[0041] Among them, J mb is the body inertia matrix, is J mb expectations, for J mb the inverse of q 0 ,q v are the scalar part and vector part of the attitude quaternion, e is the Euler axis, is the rotation angle, and respectively q 0 ,q v , e and The first derivative of , I 3 Represents a 3×3 identity matrix, matrix q v The product matrix of is defined as Expressed as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com