A large-depth all-electric drive operation type ROV platform
An electric-driven, large-depth technology, applied in underwater operation equipment, propulsion device engines, ship propulsion, etc., can solve the problems of insufficient control accuracy, large volume and weight, etc., and achieve small volume and weight, adjustable imaging focal length, and easy maintenance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments disclosed in the present invention will be further described in detail below in conjunction with the accompanying drawings.
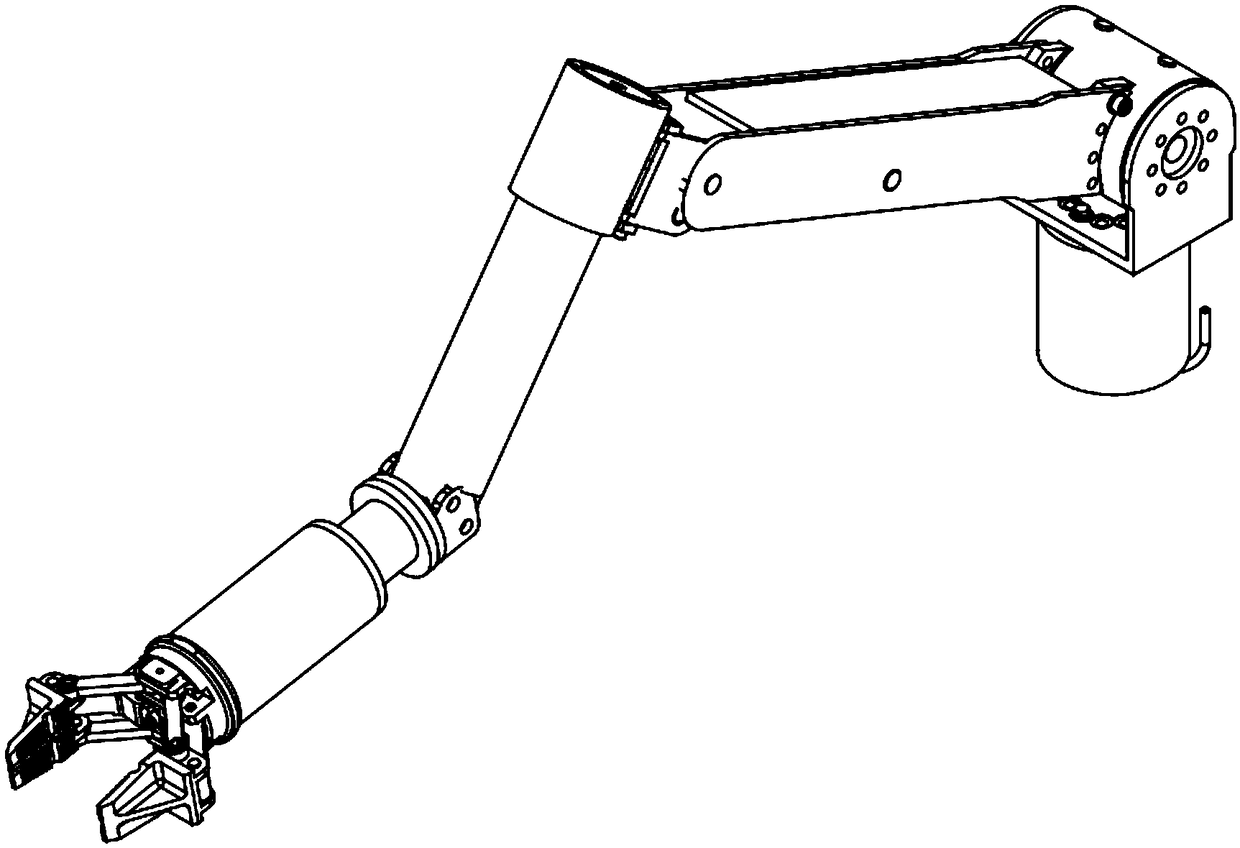
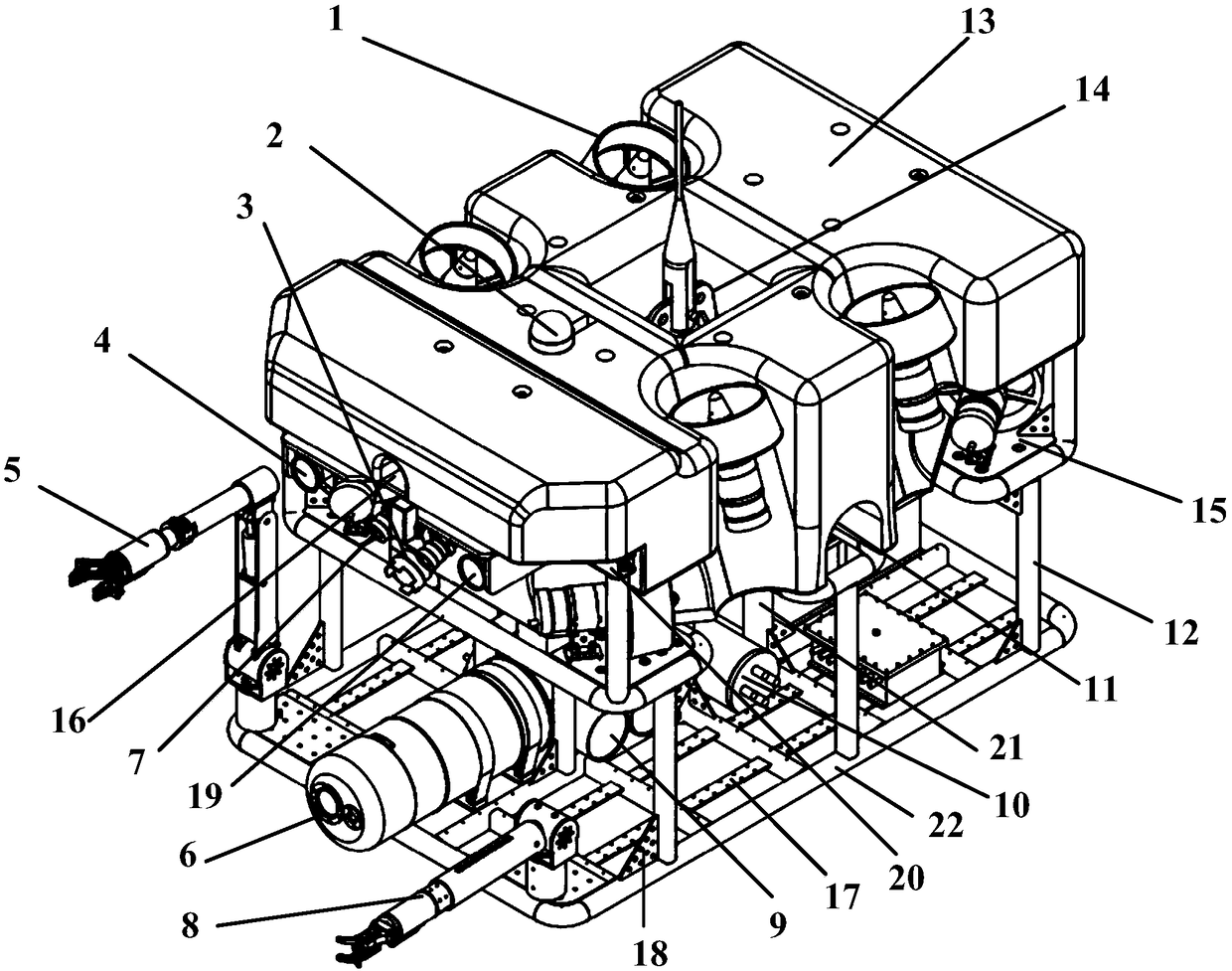
[0041] Such as Figure 1~5 , in this embodiment, the large-depth all-electric drive operating ROV platform includes: a main frame structure, and a power propulsion device 1 fixed on the main frame structure, a pan-tilt camera 2, a high-definition camera 3, a dimming LED4, functional manipulator Ⅰ5, laser imaging equipment 6, LED light 7, functional manipulator Ⅱ8, hydraulic power unit cabin 9, drive unit pressure cabin 10, main control pressure cabin 11, buoyancy mechanism 13, conventional camera 16 and fixed Focus camera 19.
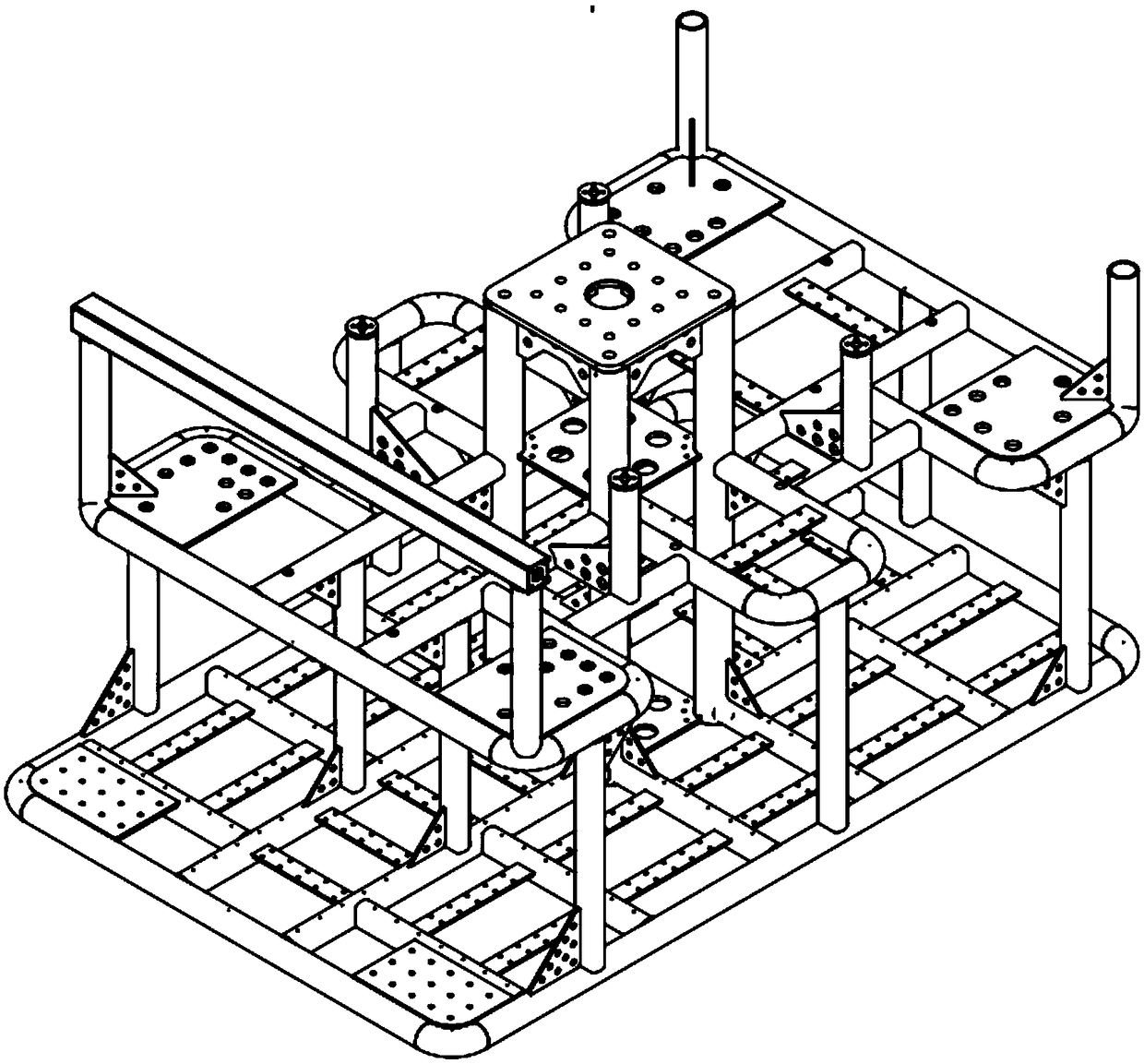
[0042]Preferably, the main frame structure includes: the main frame load-bearing longitudinal tube 12, the main frame hanging device 14, the equipment mounting plate 15, the base protection strip 17, the rib pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com