Lower limb rehabilitation robot
A rehabilitation robot and lower limb technology, applied in passive exercise equipment, massage auxiliary products, physical therapy and other directions, can solve the problems of inability to benefit the public, high price, high cost, avoid additional axial force, ensure rotation accuracy, The effect of reducing the coefficient of friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with accompanying drawing, the present invention is further described:
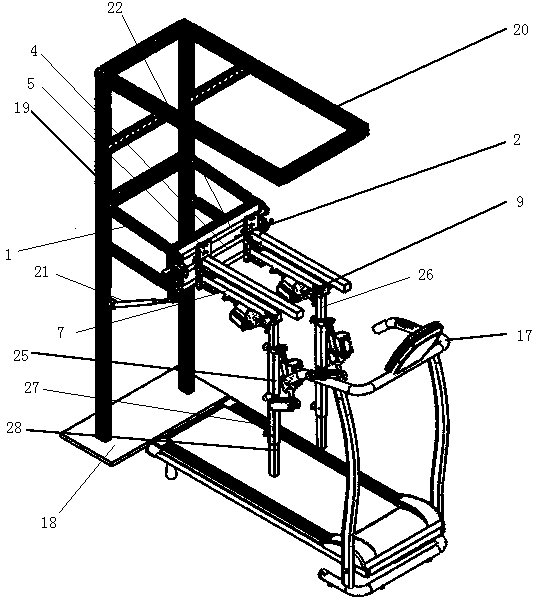
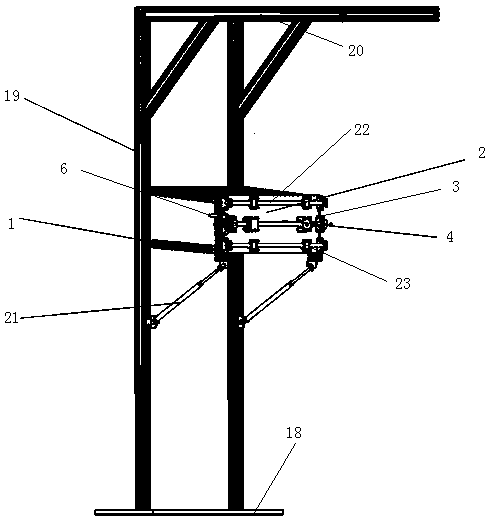
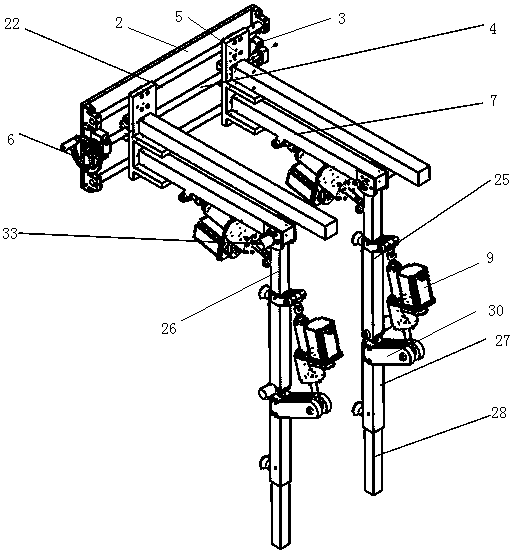
[0024]As shown in the accompanying drawings, a lower limb rehabilitation robot is provided with a bracket and a treadmill 17, and is characterized in that the bracket is provided with a parallel buffer mechanism and a leg walking aid mechanism, and the parallel buffer mechanism consists of four connecting rods 1 and Backrest board 2 is formed, and the rear end of described four connecting rods 1 is respectively hinged with bracket, and the front end of connecting rod 1 is respectively hinged with the four corners of back board surface of backboard 2, and the two ends of connecting rod 1 are respectively connected with The support and the backboard 2 are hinged to realize the up and down position movement of the backboard. The front board of the backboard 2 is provided with a leg walking aid mechanism. The leg walking aid mechanism consists of a set of width adjustment components...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com