Motion control method of lower limb joints based on wearable walking aid exoskeleton
A technology of joint movement and control method, applied in electrical program control, passive exercise equipment, physical therapy and other directions, can solve the problems of large workload of correction and optimization, poor joint movement adaptability and poor comfort of patients, etc., to reduce time Effects with economic cost, poor comfort, natural gait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
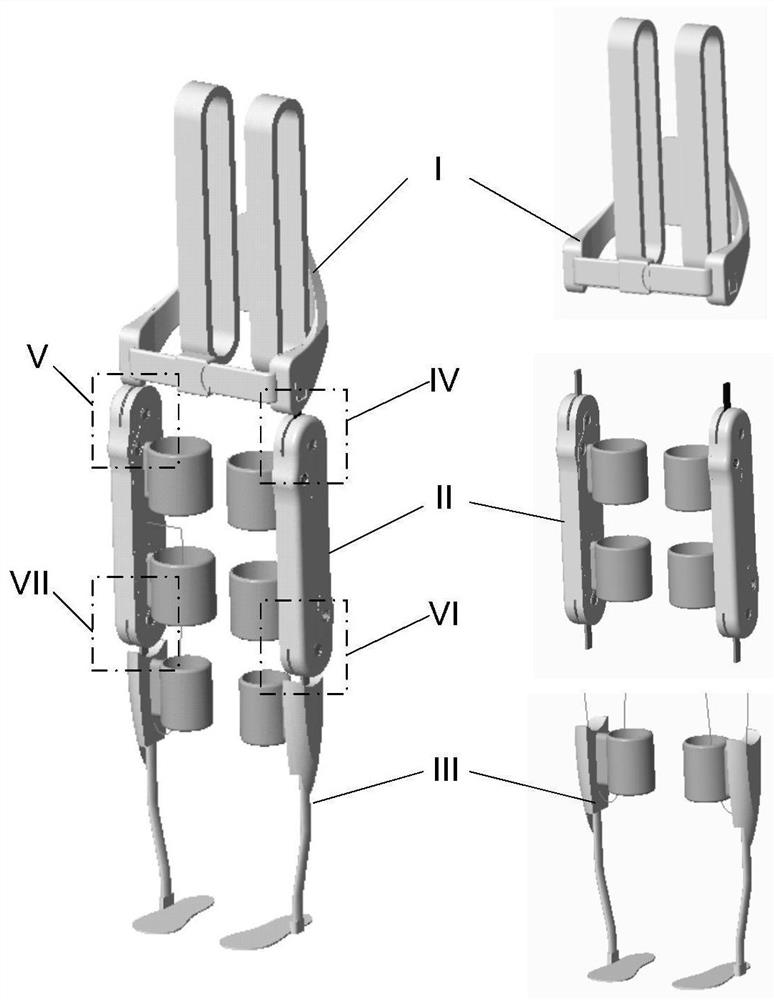
[0029] figure 1 It is the overall structure and driving joint distribution diagram of the wearable walking aid exoskeleton. The overall exoskeleton is mainly divided into three parts and five modules: a back module I, two thigh modules II, and two calf modules III (including feet). Both the thigh module II and the lower leg module III of the exoskeleton have left and right legs that are mirror images of each other. The thigh module II is connected to the lower back module I and the lower leg module III through quick plugging and unplugging. The exoskeleton has four active drive joints: hip joint IV of the left leg, hip joint V of the right leg, knee joint VI of the left leg, and knee joint VII of the left leg.
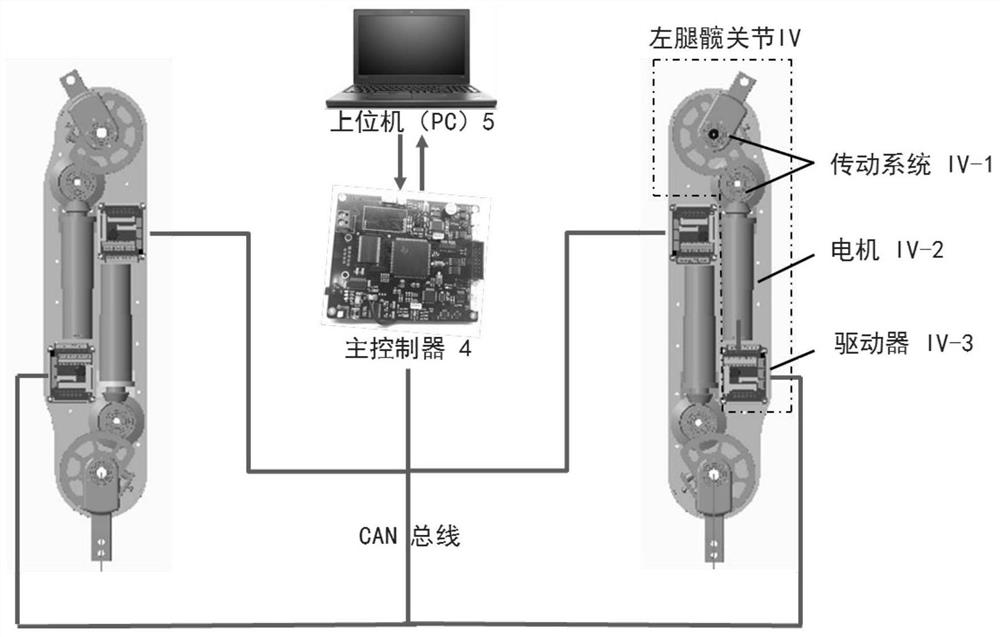
[0030] figure 2 It is the composition diagram of the drive and control system of the wearable walking aid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com