Second-order chaotic projection synchronization method based on non-singular terminal sliding mode controller
A non-singular terminal and controller technology, applied in synchronization devices, secure communication through chaotic signals, digital transmission systems, etc., can solve the problems of slow approach speed and no automatic adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0062] The drive system and the response system are isomorphic systems, both of which are Duffing-Holmes chaotic systems. The state equation of the Duffing-Holmes chaotic system is
[0063]
[0064] in, When the parameter selection is a1=-1, a=0.25, b=0.3, ω=1.0, the system is in a chaotic state. Formula (1) is the driving system. The initial state of the drive system is set to x 1 (0)=-1,x 2 (0)=1
[0065] The controlled system with modeling uncertainties and external disturbance signals is expressed as
[0066]
[0067] in, The modeling uncertainty Δf(y) is set to Δf(y)=0.5y 1 , the external interference signal d(t) is set as d(t)=0.5sin(5t), and μ=b can be obtained 0 +b 1 |y 1 |, where b 0 =0.5,b 1 = 0.5. Formula (2) with modeling uncertainties and external disturbance signals is taken as the response system. The initial state of the response system is set to y 1 (0)=1.5,y 2 (0)=1.5.
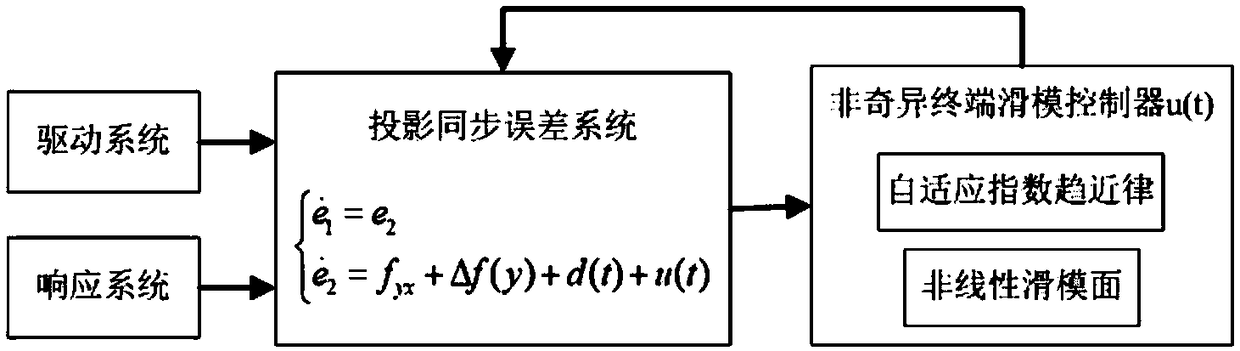
[0068] The projection synchronization error system is formula (4...
specific Embodiment 2
[0078] Drive system and response system are heterogeneous systems. The driving system is a Duffing-Holmes chaotic system, and the response system is a van der Pol chaotic system. The state equation of the Duffing-Holmes chaotic system is
[0079]
[0080] in, When the parameter is selected as a 1 =-1, a=0.25, b=0.3, ω=1.0, the system is in a chaotic state. Formula (1) is used as the driving system. The initial state of the drive system is set to x 1 (0)=2,x 2 (0)=-2.
[0081] The state equation of the van der Pol chaotic system is
[0082]
[0083] Among them, f y (y,t)=-y 1 +B(1-y 1 2 )y 2 +Asin(ω 2 t). When the parameter selection is B=3, A=5, ω 2 =1.788, the system is in a chaotic state. The controlled system with modeling uncertainties and external disturbance signals is expressed as
[0084]
[0085] Among them, the modeling uncertainty Δf(y) is set to Δf(y)=0.8y 2 , the external interference signal d(t) is set as d(t)=0.7sin(3t), and μ=b can b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com