Mobile robot SLAM method based on improved EMM and ORB algorithms
A mobile robot and algorithm technology, applied in computer parts, instruments, calculations, etc., can solve the problems of large error and low robustness, and achieve the effect of small error, no training, and strong robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
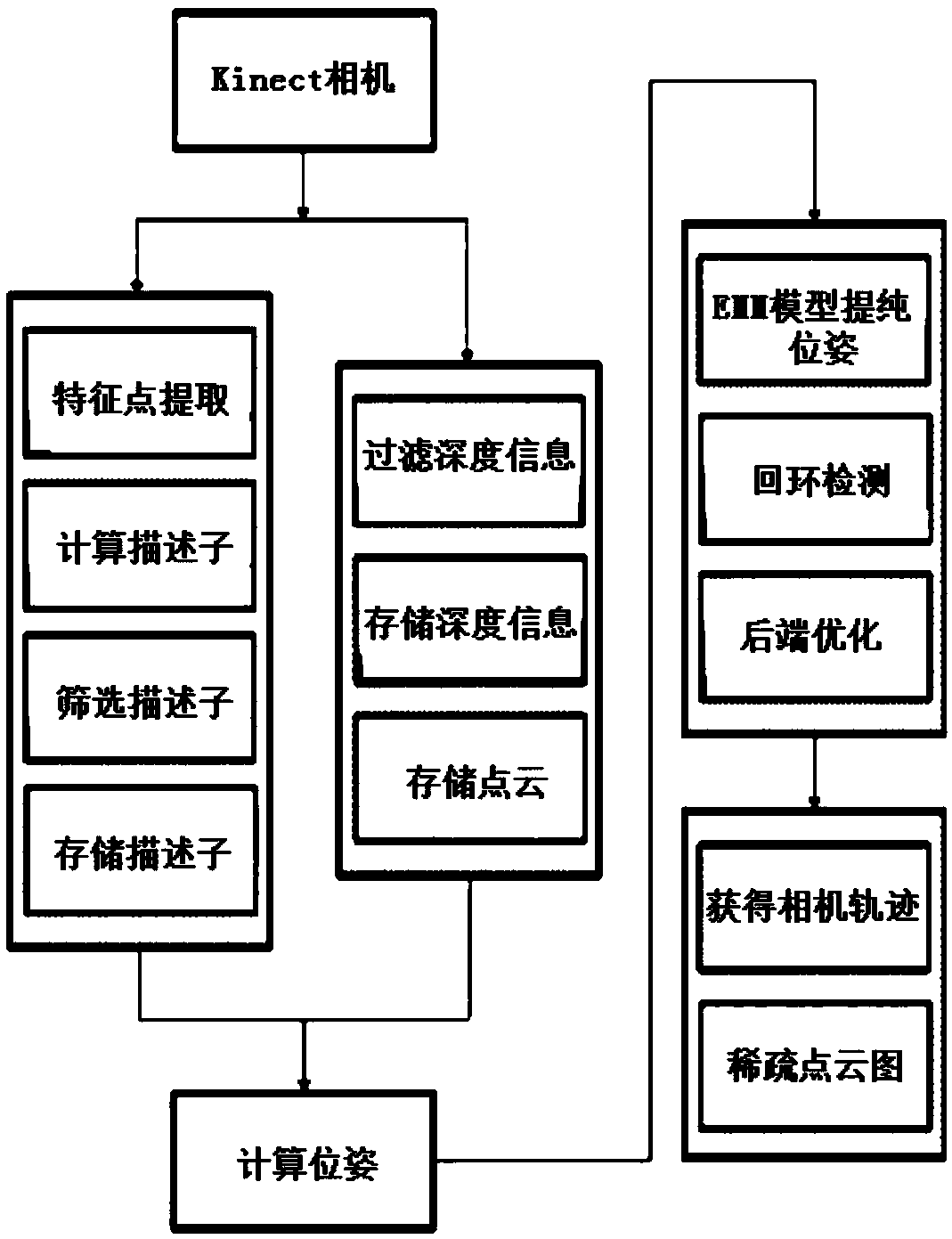
[0039] The mobile robot SLAM method based on the improved environmental measurement model (EMM) and ORB algorithm proposed by this application is used for the intelligent inspection of robots in various fields involving safety in the inspection robot industry and life, mainly including feature point extraction and matching Algorithm, feature point Mahalanobis distance calculation, observation likelihood calculation of environmental measurement model, loop closure detection and back-end optimization. Such as figure 1 As shown, the method specifically includes the following steps:
[0040] S1. Collect color images and depth images through a 3D camera. In this embodiment, the 3D camera uses Kinect, and the number of pixels in the picture is 640×480. The improved ORB algorithm is used to extract the feature points of the color image and calculate the descriptor. At the same time, the depth image is processed. filtering.
[0041] The process of using the improved ORB algorithm to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com