Large-FOV (field of view) short-range laser radar and vehicle
A technology of lidar and large field of view, applied in the field of laser detection, can solve the problems of complex structure of vehicle lidar, small vertical field of view, detection blind spot, etc., to reduce the blind spot of short-range detection, large detection range and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0054] figure 1 It is a schematic structural diagram of the large field of view short-range laser radar provided by the embodiment of the present invention, please refer to figure 1 , the large field of view short-range lidar disclosed in this embodiment includes a laser emitting module, a laser receiving module and a rotating structure, and the rotating structure is used to drive the laser emitting module and the laser receiving module to rotate horizontally.
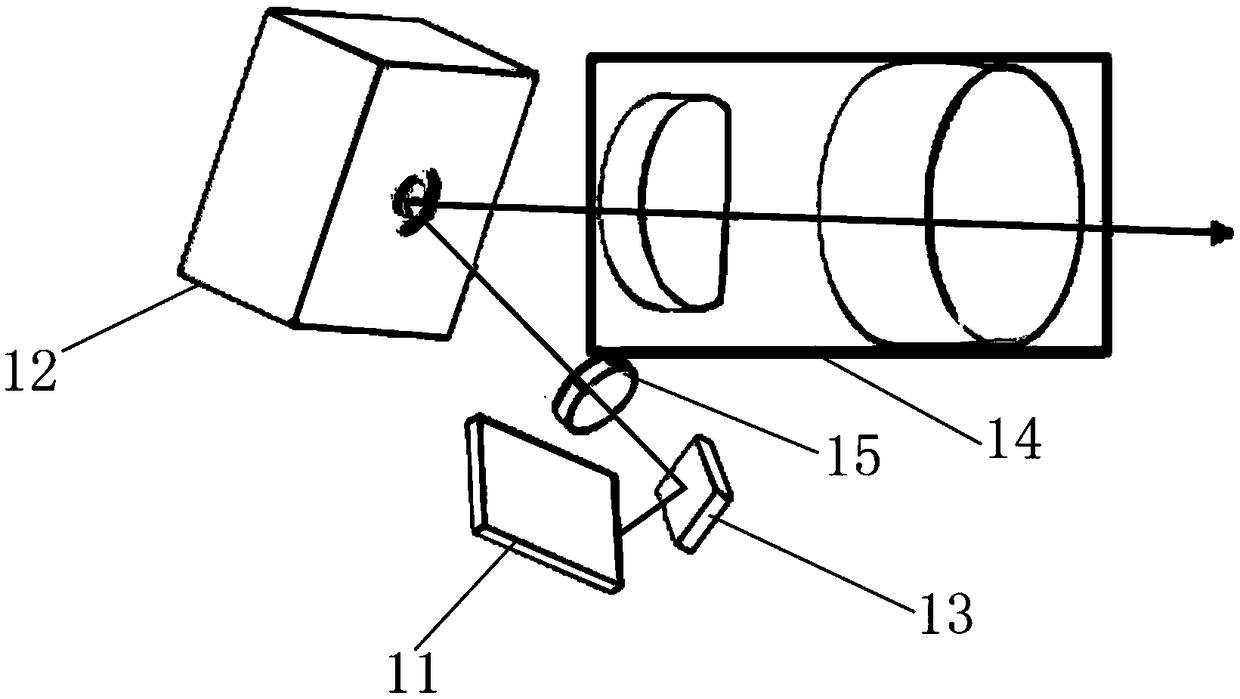
[0055] figure 2 It is a schematic structural diagram of the laser emitting module provided by the embodiment of the present invention, please refer to figure 2 , in an optional implementation manner, the laser emitting module includes:
[0056] Laser 11, for emitting outgoing laser beams;
[0057]A control circuit for controlling the operation of the laser 11;
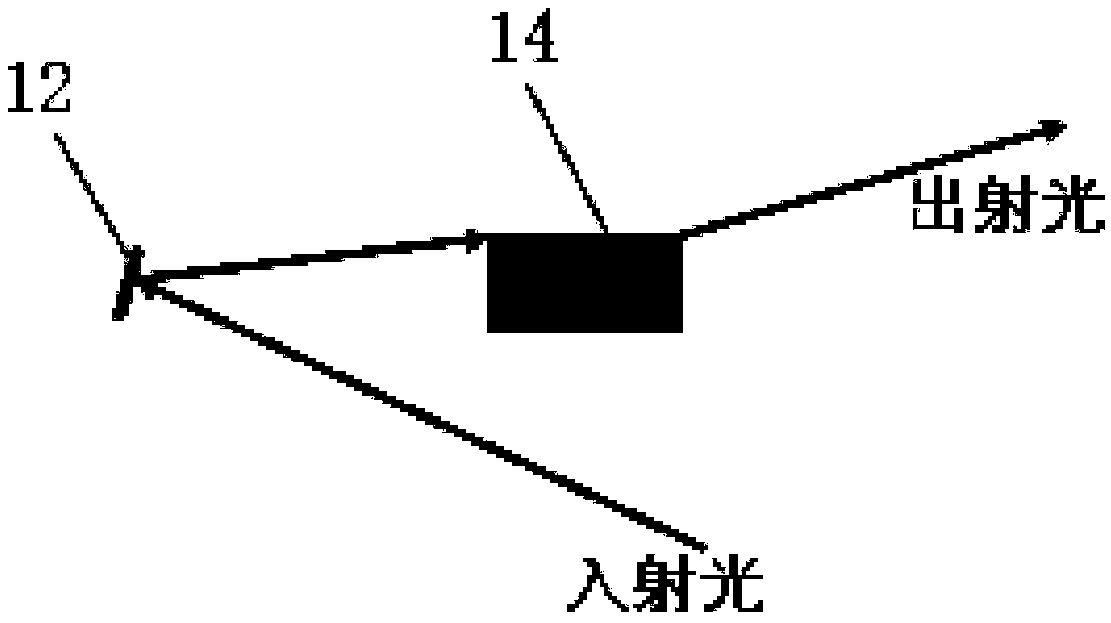
[0058] One-dimensional vibrating mirror 12, used to change the optical path direction of the outgoing laser beam in the vertical direction;
[0059] Spe...
Embodiment 2
[0092] In order to solve the problem of detection blind spots in the vehicle-mounted laser radar in the prior art, the vehicle disclosed in this embodiment adopts the large-field-of-view short-range laser radar described in Embodiment 1, which can realize 360° rotation in the horizontal direction and Large field of view scanning in the vertical direction. Compared with the prior art, the short-range lidar with a large field of view adopted in this embodiment has a larger vertical field of view, which can reduce the detection blind spot of the vehicle-mounted lidar.
[0093] Figure 9 It is a schematic diagram of the installation position of the laser radar provided by the embodiment of the present invention, please refer to Figure 9 , the vehicle-mounted lidar provided by the prior art is usually installed on the top of the vehicle. However, in the autonomous driving technology, the environment perception system needs to perceive obstacles, such as vehicles, pedestrians, traffi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com