Inverse kinematics solving method for any three joints
An inverse kinematics and three-joint technology, which is applied in the field of inverse kinematics solution of any three joints, can solve the problems of restricting the mechanical structure design of the robot, not being able to obtain a closed solution, and difficult to guarantee the geometric relationship.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
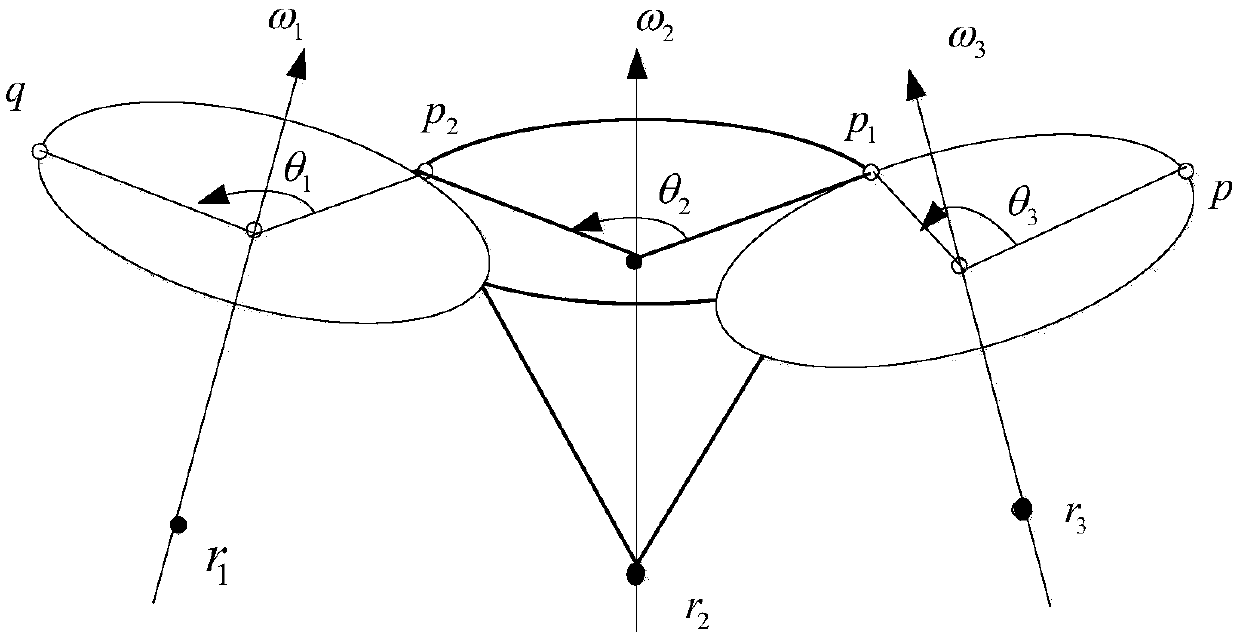
[0068] The RRR inverse solution of any relation is as figure 1 shown.
[0069] A method for solving inverse kinematics of any three joints, comprising the following steps:
[0070] Step 1: Solve for θ 1 and θ 3
[0071] Space point p around axis ω 3 Rotation angle θ 3 to point p 1 , and then around the axis ω 2 Rotation angle θ 2 to point p 2 , and finally point p 2 Around axis ω 1 Rotation angle θ 1 To point q, this process can be expressed as:
[0072]
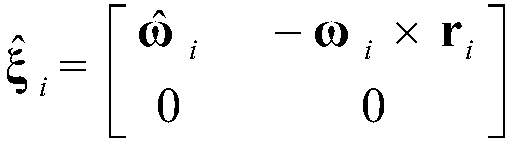
[0073] in, is the homogeneous coordinate of p, q, is the motion screw of joint i, Axis direction vector including the joint axis and a point on the axis ω i and r i is called the spinor parameter, The expression form is as follows:
[0074]
[0075] in, is ω i The antisymmetric matrix of , if ω i =[ω ix ,ω iy ,ω iz ] T ,but Can be expressed as:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com