Passive cooperative positioning method for predicting fast covariance interactive fusion on basis of information theory
A collaborative positioning and covariance technology, applied in positioning, measuring devices, radio wave measuring systems, etc., can solve the problems of tracking accuracy to be improved, high communication bandwidth requirements, and high computational complexity, so as to improve the fusion effect and complexity The effect of high and low algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0014] Combine below figure 1 The present invention is further analyzed.
[0015] The specific algorithm steps are as follows:
[0016] Step 1 specifically establishes a mathematical model of a passive co-location system with two receiving stations and one external radiation source in a two-dimensional space.
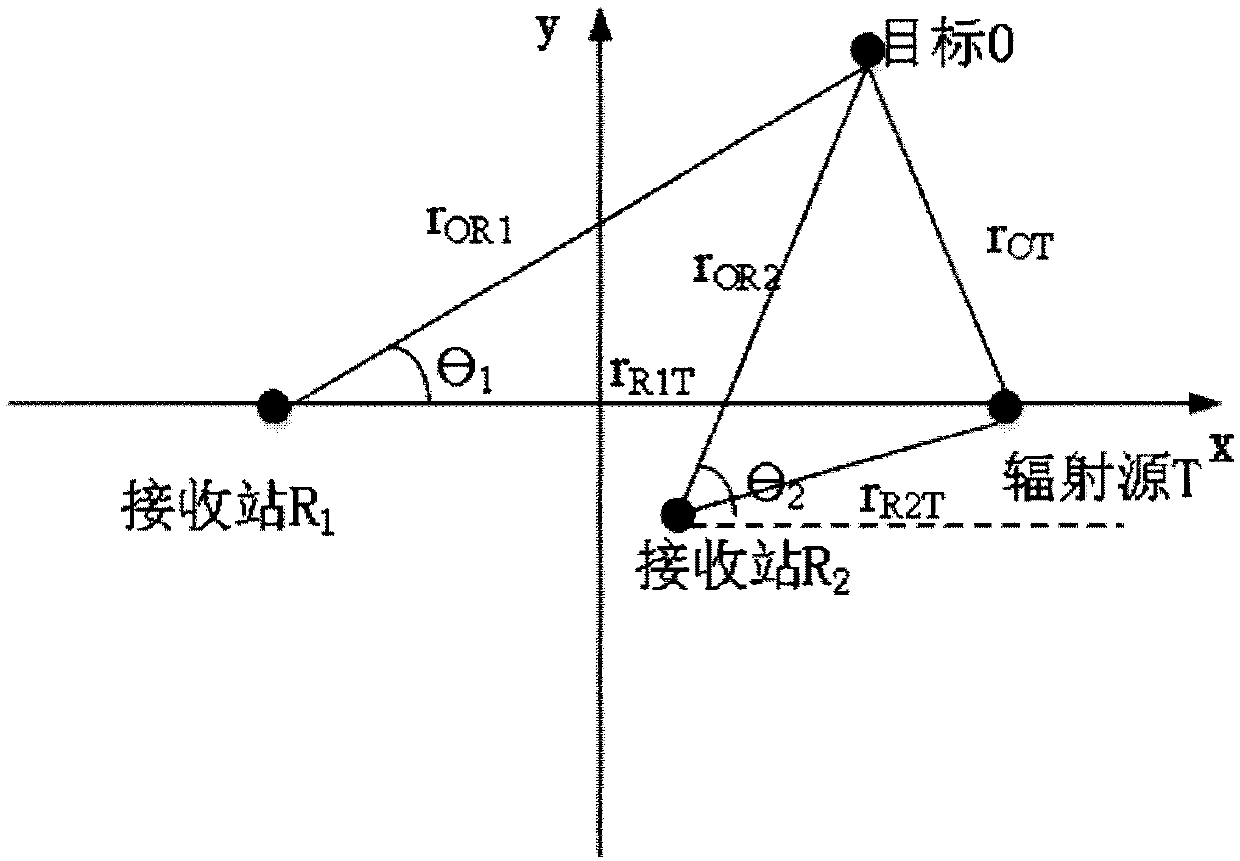
[0017] consider as figure 2 The PCL system shown with two receiving stations and one external radiation source, R 1 and R 2 Respectively represent receiving station 1 and receiving station 2, T represents the external radiation source, O represents the target, r OR1 Indicates O and R 1 the distance between, r OR2 Indicates O and R 2 the distance between, r OT Indicates the distance between O and T, r R1T means R 1 Distance from T, r R2T means R 2 distance from T.
[0018] First establish the target motion model, and record the state of the target at the kth frame can be: where [x(k),y(k)] and Represent the position and velocity of the target in the kth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com