Simultaneous localization and mapping method and device based on rodent model
A technology of simultaneous positioning and map construction, which is applied to services based on location information, road network navigators, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
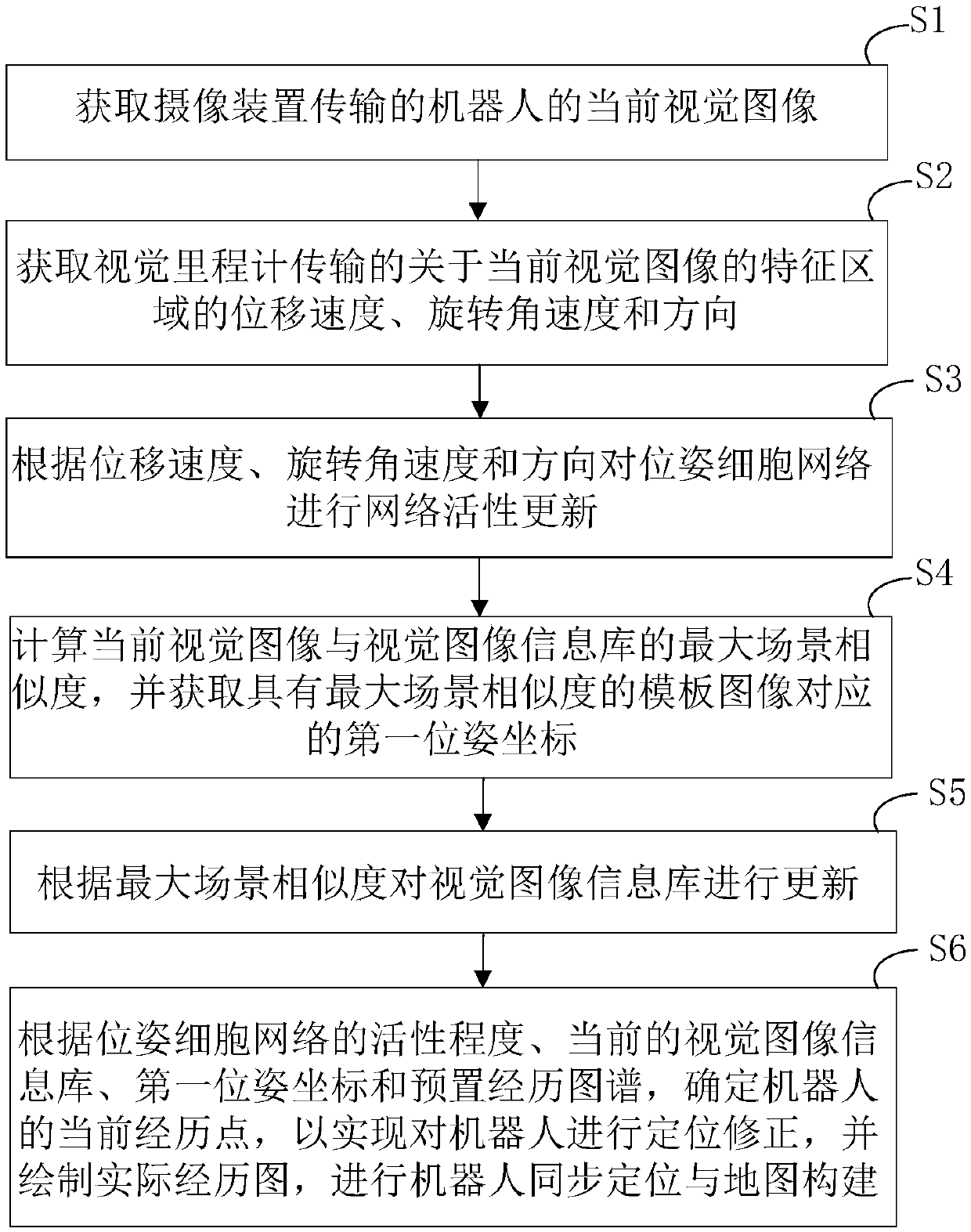
[0055] combine figure 1 , the rodent model-based synchronous positioning and map construction method provided in this embodiment, the method includes:
[0056] Step S1, acquiring the current visual image of the robot transmitted by the camera device;
[0057] Step S2, obtaining the displacement velocity, rotational angular velocity and direction of the feature region of the current visual image transmitted by the visual odometer;
[0058] Step S3, update the network activity of the pose cell network according to the displacement velocity, rotation angular velocity and direction;
[0059] Step S4, calculating the maximum scene similarity between the current visual image and the visual image information base, and obtaining the first pose coordinates corresponding to the template image with the maximum scene similarity;
[0060] Step S5, updating the visual image information base according to the maximum scene similarity;
[0061] Step S6, according to the activity of the pose...
Embodiment 2
[0146] combine Figure 5 According to an embodiment of the present invention, a device for synchronous positioning and map construction of a robot based on a rodent model, the device includes:
[0147] The first acquisition unit 1 is used to acquire the current visual image of the robot transmitted by the camera device;
[0148] The second acquisition unit 2 is used to acquire the displacement velocity, rotational angular velocity and direction of the feature area of the current visual image transmitted by the visual odometer;
[0149] An active updating unit 3, which is used to update the network activity of the pose cell network according to the displacement velocity, rotational angular velocity and direction;
[0150] A similarity calculation unit 4, used to calculate the maximum scene similarity between the current visual image and the visual image information base, and obtain the first pose coordinates corresponding to the template image with the maximum scene similari...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com