Online detection method based on laser radar
A technology of laser radar and detection method, which is applied in the field of rail transit safety, and can solve problems such as large error in tunnel intrusion detection and inability to achieve real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
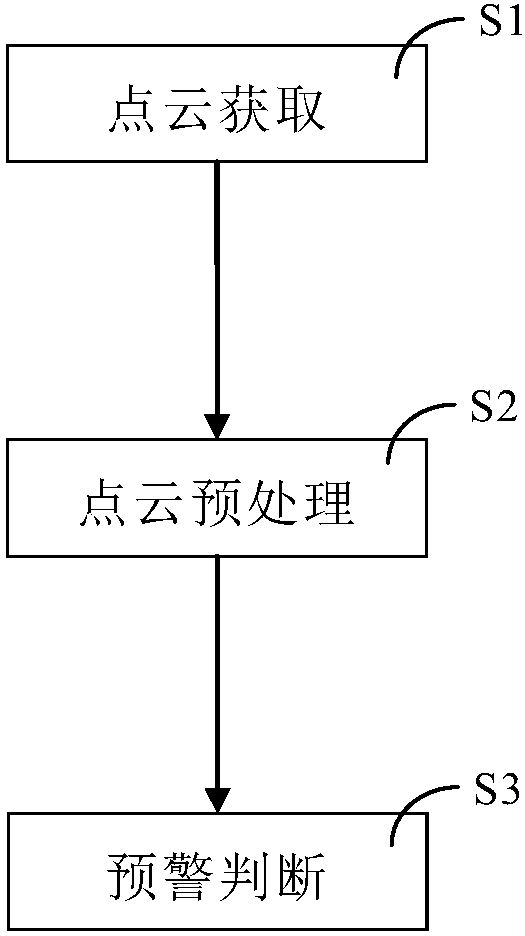
[0077] Such as figure 1 As shown, the present invention provides a kind of online detection method based on laser radar, comprises the following steps:
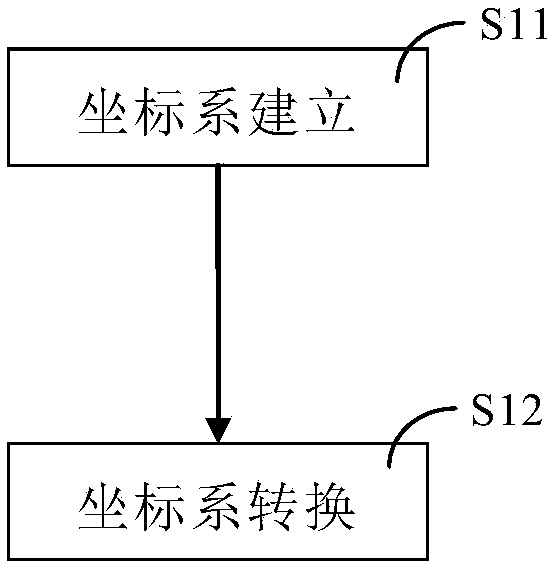
[0078] S1. Point cloud acquisition: establish the global coordinate system, vehicle body coordinate system and measurement coordinate system at the initial position of the intelligent inspection robot, and convert the detection point coordinates measured by the laser radar into the position coordinates in the global coordinate system; figure 2 As shown, step S1 further includes the following steps:
[0079] S11. Establish a global coordinate system X at the initial position of the intelligent inspection robot P Y P Z P , car body coordinate system X B Y B Z B and the measurement coordinate system X of the lidar L Y L Z L ;
[0080] S12. Put the scanning point p obtained during the movement of the intelligent inspection robot in the measurement coordinate system X L Y L Z L under the coordinates Convert to glob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com