Extraction method and system of three-dimensional line segments of scattered point cloud
An extraction method and extraction system technology, which is applied in the field of 3D line segment extraction from scattered point clouds, can solve problems such as the number of projected images, the resolution and the difficulty in determining the viewpoint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
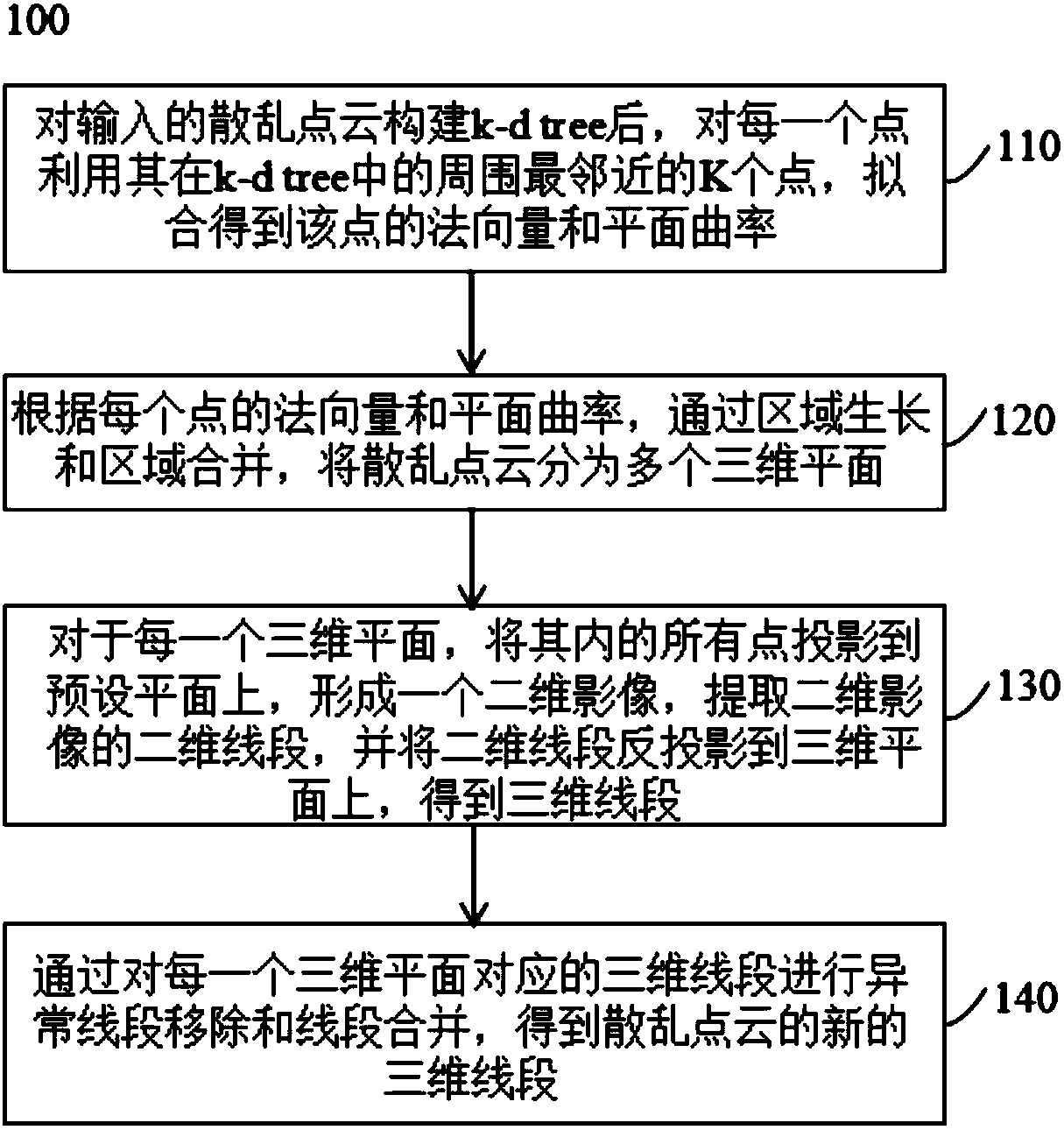
[0060] A method 100 for extracting three-dimensional line segments from scattered point clouds, such as figure 1 shown, including:
[0061] Step 110, after constructing a k-d tree for the input scattered point cloud, use the nearest K points around each point in the k-d tree to fit the plane curvature of the point.
[0062] Step 120, divide the scattered point cloud into multiple three-dimensional planes through region growing and region merging according to the plane curvature of each point.
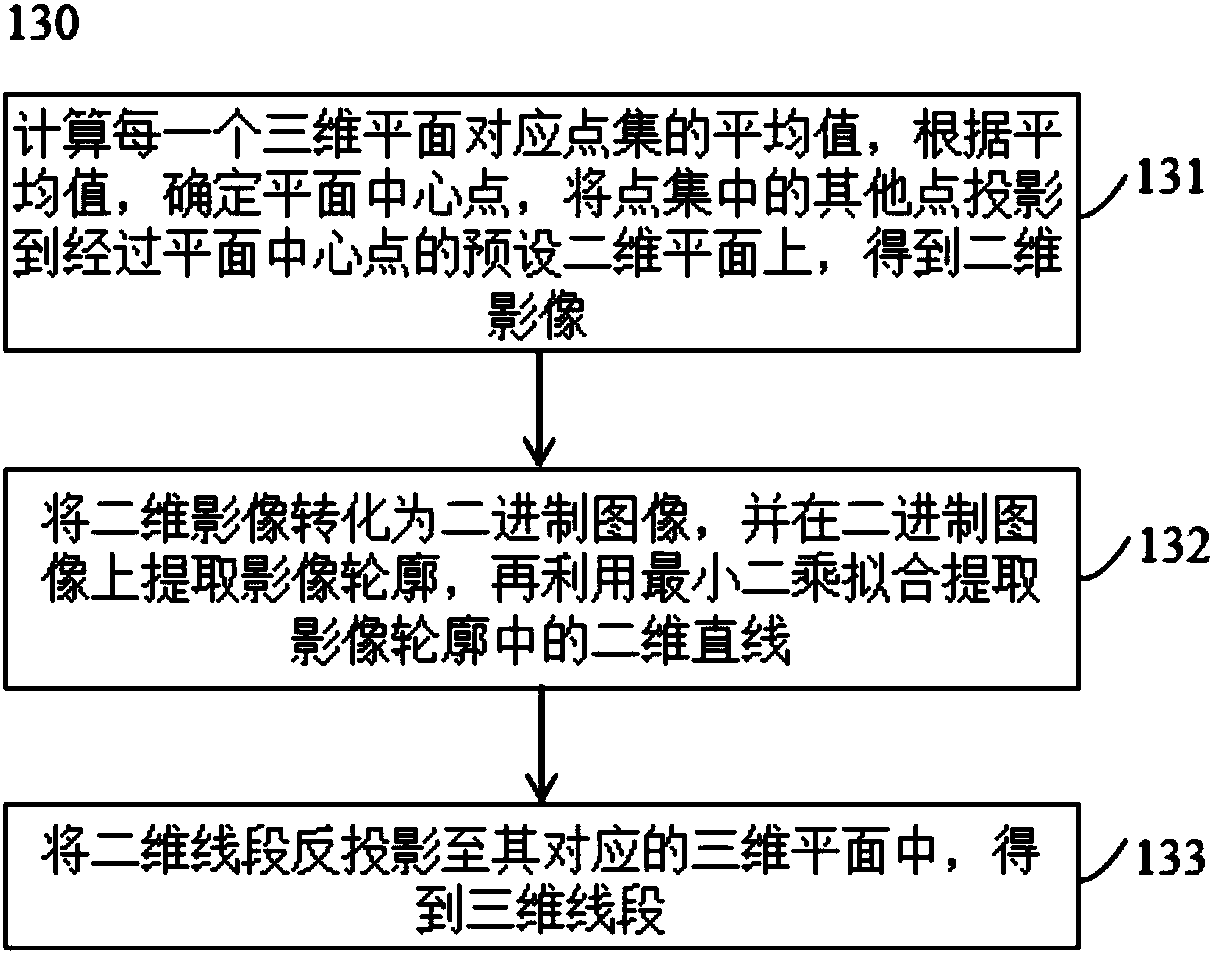
[0063] Step 130. For each 3D plane, project all the points in it onto the preset plane to form a 2D image, extract the 2D line segment of the 2D image, and back-project the 2D line segment onto the 3D plane to obtain 3D line segment.
[0064] Step 140: Obtain new 3D line segments of the scattered point cloud by performing abnormal line segment removal and line segment merging on the 3D line segments corresponding to each 3D plane.
[0065] In the first step of this embodiment, the po...
Embodiment 2
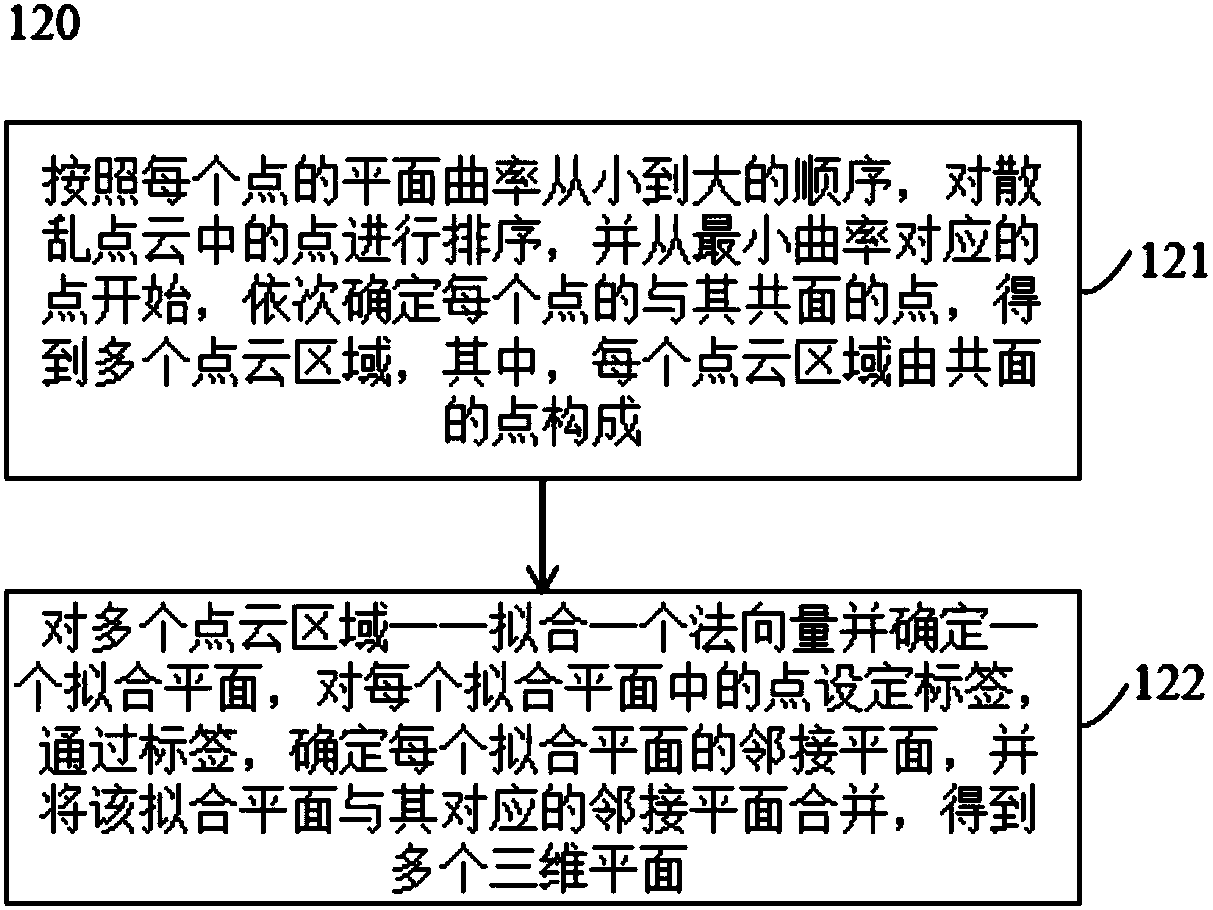
[0067] On the basis of Example 1, as figure 2 As shown, step 120 includes:
[0068] Step 121, sort the points in the scattered point cloud according to the order of the plane curvature of each point from small to large, and start from the point corresponding to the minimum curvature, sequentially determine the coplanar points of each point, and obtain multiple Point cloud regions, where each point cloud region consists of coplanar points.
[0069] Step 122, fitting a normal vector to multiple point cloud regions one by one and determining a fitting plane, setting a label for each point in the fitting plane, and determining the adjacent plane of each fitting plane through the label, and The fitted plane is merged with its corresponding adjacent planes to obtain a plurality of three-dimensional planes.
[0070] It should be noted that step 121 is region growing. Specifically, sort each point in the point cloud data according to the curvature of each point, and first select t...
Embodiment 3
[0076] On the basis of Embodiment 2, step 110 includes:
[0077] Step 111, constructing a k-dtree corresponding to the scattered point cloud.
[0078] Step 112, for each point p in the scattered point cloud i , let the set of its K nearest neighbors in the k-d tree be Construct the covariance matrix Σ:
[0079]
[0080] In the formula, Σ represents a 3×3 covariance matrix, and K is the number of midpoints, yes Average of midpoints.
[0081] Step 113, solve for the eigenvalue of the covariance matrix Σ, and use the minimum eigenvalue as the point p i plane curvature of
[0082] Specifically, the eigenvalue equation is first formed: λV=ΣV. Singular value decomposition (SVD decomposition) of this equation yields three eigenvalues and corresponding three eigenvectors, also known as principal components (PCs). Arrange these three eigenvalues from largest to smallest: λ 2 >λ 1 >λ 0 , and the corresponding three eigenvectors are denoted as v 2 , v 1 and v ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com