A closed-loop verification system and method for a lunar landing and take-off control system
A control system and verification system technology, applied in the field of spacecraft ground verification, can solve the problems of inability to realize closed-loop verification of the lunar soft landing process, inability to select, poor authenticity and reliability of ground verification, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
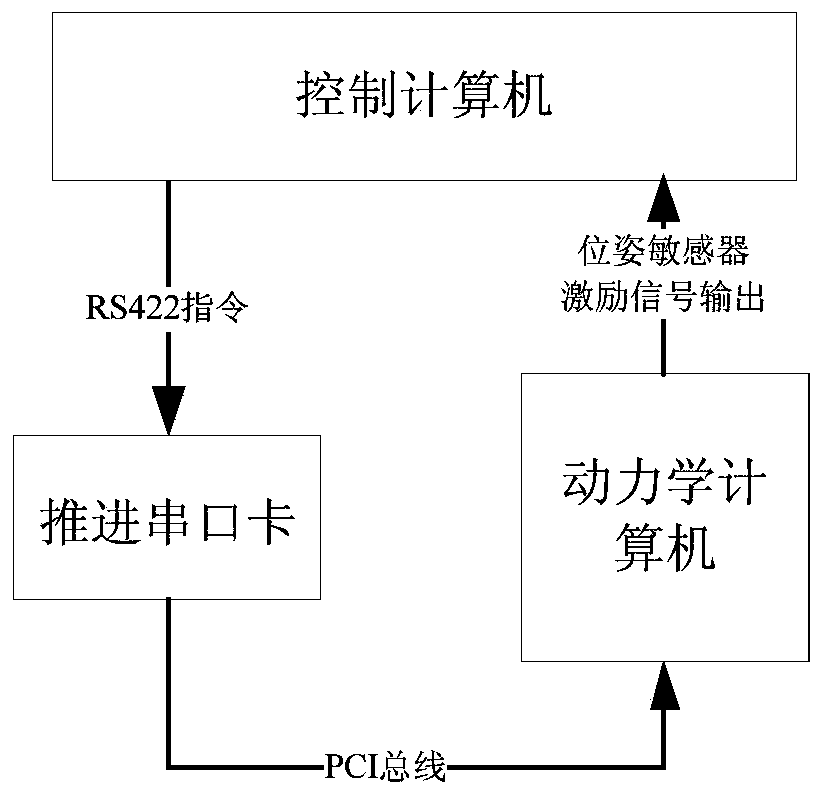
[0086] Such as figure 1 As shown, the digital closed-loop verification system for the landing control system includes a control computer, a propulsion serial card and a dynamics computer;
[0087] When using the digital closed-loop verification method of the landing control system and in landing mode:
[0088] (11) The control computer receives the measurement output of the upper assembly star sensor, sun sensor, gyroscope, accelerometer, distance measuring sensor, speed sensor and other sensors, and calculates the position and speed of the upper assembly in the inertial space , attitude, angular velocity and other information, according to the on-board algorithm, calculate the required engine thrust and control torque, generate RS422 serial port commands according to the communication protocol with the propulsion circuit box, and send the RS422 serial port commands to the propulsion serial port card;
[0089] (12) After the serial port card receives the RS422 serial port com...
Embodiment 2
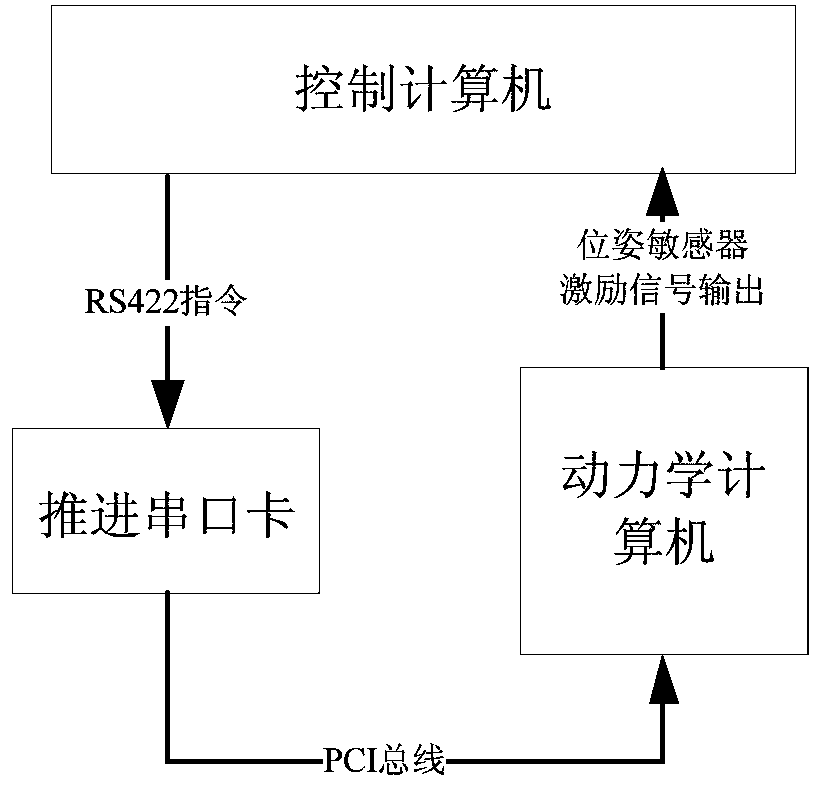
[0093] Such as figure 2 As shown, the digital closed-loop verification system for the takeoff control system includes a control computer, a propulsion serial card and a dynamics computer;
[0094] When using the digital closed-loop verification method of the takeoff control system and in takeoff mode:
[0095] (21) The control computer receives the measurement output of the ascender star sensor, sun sensor, gyroscope, accelerometer, and other sensors, and calculates the position, speed, attitude, angular velocity and other information of the upper assembly in the inertial space. Algorithm, calculate the required engine thrust and control torque, generate RS422 serial port commands according to the communication protocol with the propulsion circuit box, and send the RS422 serial port commands to the propulsion serial port card;
[0096] (22) advance the serial port card to receive the RS422 serial port instruction that the control computer sends, and the RS422 serial port ins...
Embodiment 3
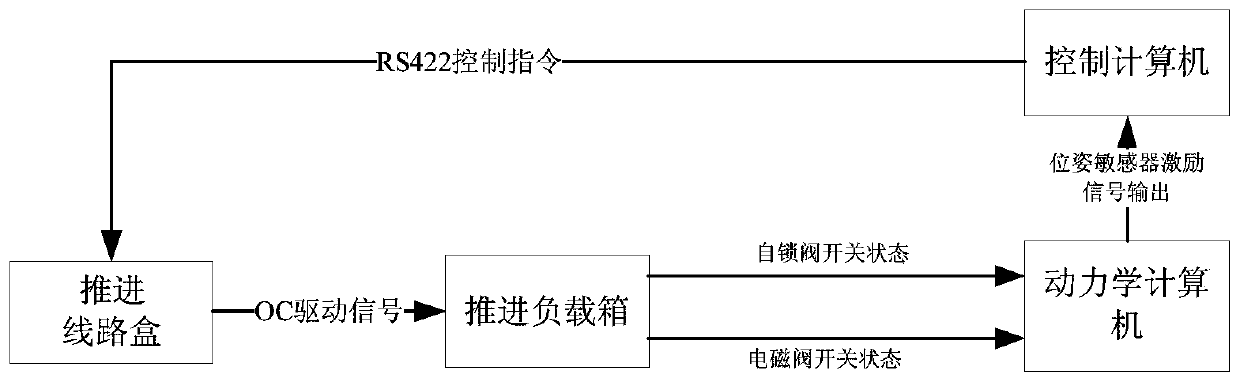
[0100] Such as image 3 As shown, the physical closed-loop verification system of the landing control system includes a control computer, a propulsion circuit box, a propulsion load box, a stepper motor and a dynamic computer;
[0101] When using the physical closed-loop verification method of the landing control system and in landing mode:
[0102](31) The control computer receives the measurement output of the upper assembly star sensor, sun sensor, gyroscope, accelerometer, distance measuring sensor, speed sensor and other sensors, and calculates the position and speed of the upper assembly in the inertial space , attitude, angular velocity and other information, calculate the required engine thrust and control torque according to the on-board algorithm, generate RS422 serial port commands according to the communication protocol with the propulsion circuit box, and send the RS422 serial port commands to the propulsion circuit box;
[0103] (32) The propulsion line box rece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com