Method for positioning multiple beacons in real time underwater
A real-time positioning and beacon technology, applied in positioning, measuring devices, instruments, etc., can solve problems such as low positioning accuracy, complex algorithms, and complex design, and achieve the effects of improving measurement efficiency, simple and reliable algorithms, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
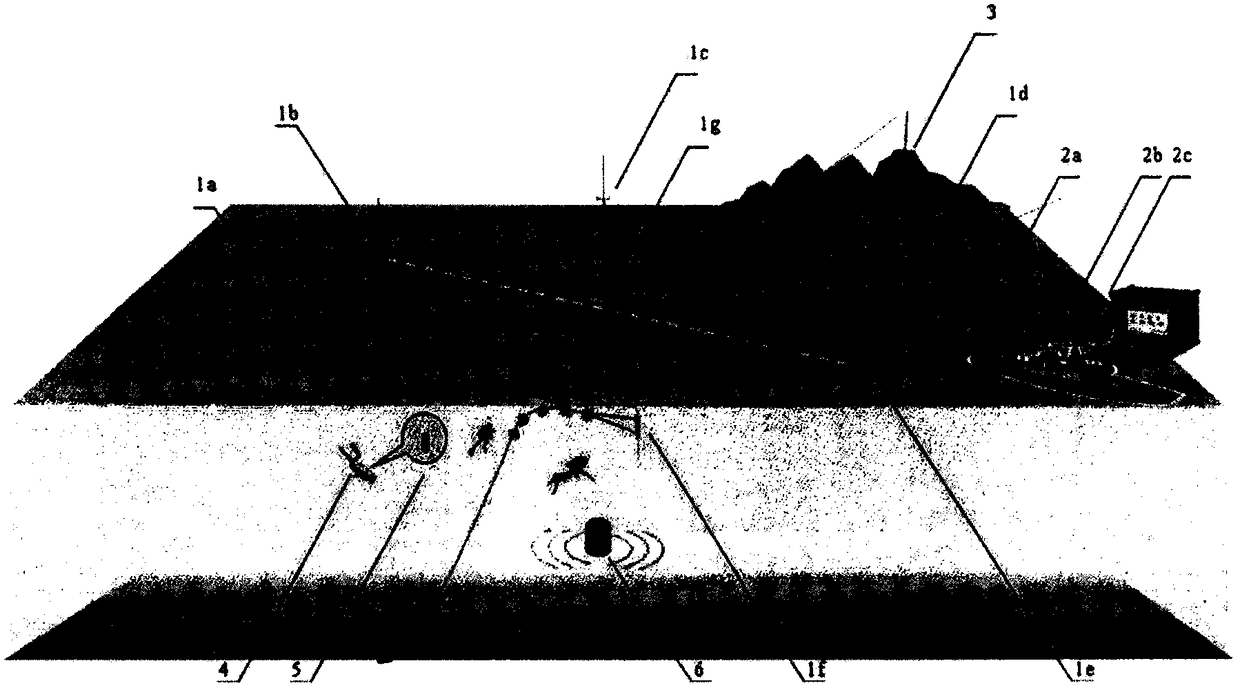
[0011] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. This embodiment discloses a method for real-time positioning of multiple underwater moving objects.
[0012] Step 1: System Construction
[0013] Such as figure 1 As shown, the system construction includes 6 water surface receiving buoys forming a honeycomb type and 1 water surface center transceiver main buoy located in the middle of a regular hexagon to form a positioning area. In the digital transmission station, the underwater part hangs the underwater acoustic transceiver transducer, and its three-dimensional spatial position can be regarded as a known quantity through the real-time measurement of the equipped DGPS. An on-line calibration sound source with a known underwater position in the positioning area is used to calibrate the entire system online. The object to be located carries a responsive acoustic positioning beacon, and the mai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com