Robot, and pose estimation method and device based on marker
A pose estimation and robot technology, applied in the field of computer vision, can solve the problems of pitch angle and roll angle redundancy, large pose error, etc., and achieve the effect of precise pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
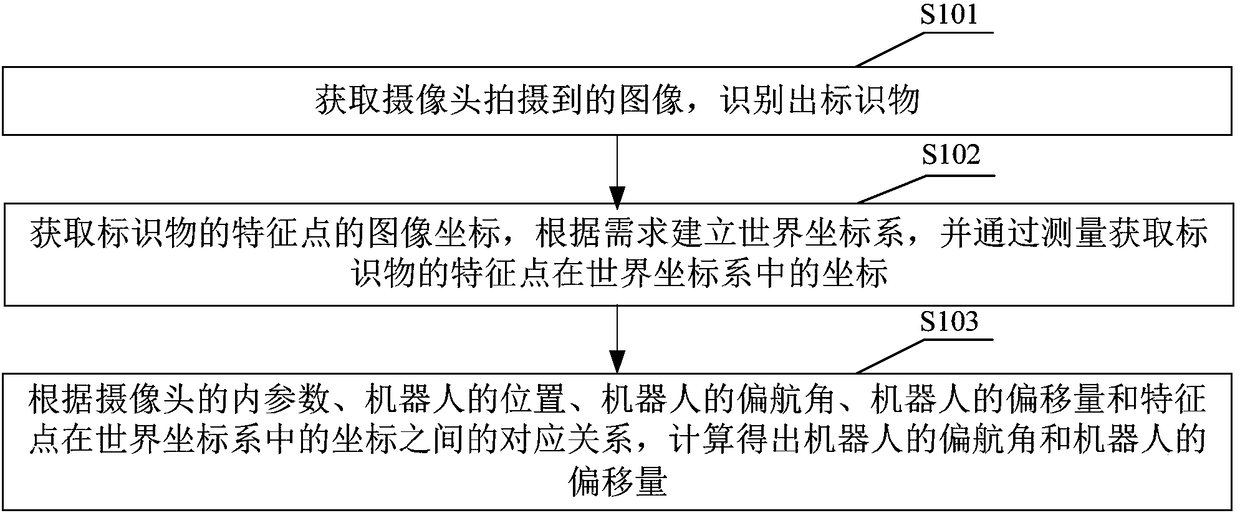
[0024] see figure 1 The marker-based pose estimation method for a robot provided in Embodiment 1 of the present invention includes the following steps: It should be noted that if there are substantially the same results, the marker-based pose estimation method for a robot in the present invention does not use figure 1 The flow sequence shown is limited.
[0025] S101. Acquire an image captured by a camera, and identify a marker.
[0026] The plane where the marker is located is a plane parallel to the camera. For example, markers are attached to the ceiling or floor of the space where the robot is located.
[0027] The shape of the marker can be arbitrary, such as circle, quadrangle, pentagon, irregular shape, etc.
[0028] In Embodiment 1 of the present invention, S101 may specifically include the following steps:
[0029] Obtain the image captured by the camera;
[0030] convert the image to grayscale;
[0031] Using adaptive binarization operations and contour search ...
Embodiment 2
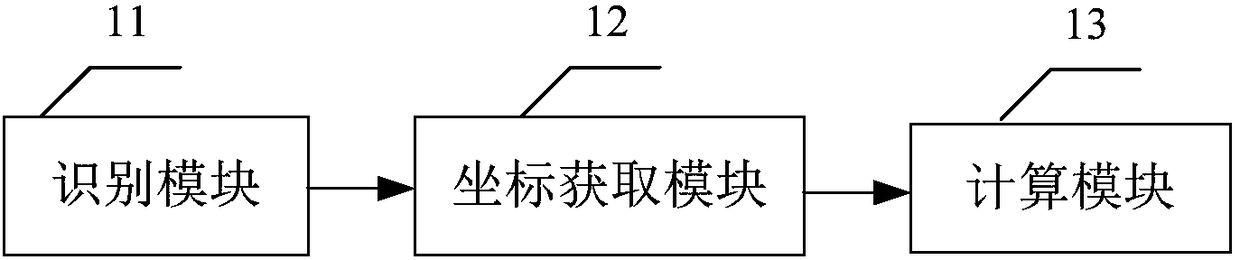
[0049] see figure 2 The marker-based pose estimation device for a robot provided in Embodiment 2 of the present invention includes:
[0050] The identification module 11 is used to acquire the image captured by the camera and identify the marker;
[0051] The coordinate acquisition module 12 is used to obtain the image coordinates of the feature points of the marker, establish a world coordinate system according to requirements, and obtain the coordinates of the feature points of the marker in the world coordinate system by measuring;
[0052] The calculation module 13 is used to calculate the yaw of the robot according to the correspondence between the internal parameters of the camera, the position of the robot, the yaw angle of the robot, the offset of the robot, and the coordinates of the feature points in the world coordinate system Corners and robot offsets.
[0053] The robot pose estimation device based on markers provided in Embodiment 2 of the present invention an...
Embodiment 3
[0055] Embodiment 3 of the present invention provides a computer-readable storage medium. The computer-readable storage medium stores a computer program. The steps of the pose estimation method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com