Adjustment method of end pose error of space-borne antenna space extension arm
A technology of spaceborne antenna and adjustment method, which is applied in the direction of rotating antenna, folding antenna, etc., can solve the problems of time-consuming adjustment, the method of adjusting the position and posture error of the space extension arm end of the spaceborne antenna, etc., and achieve the effect of shortening the working hours of adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
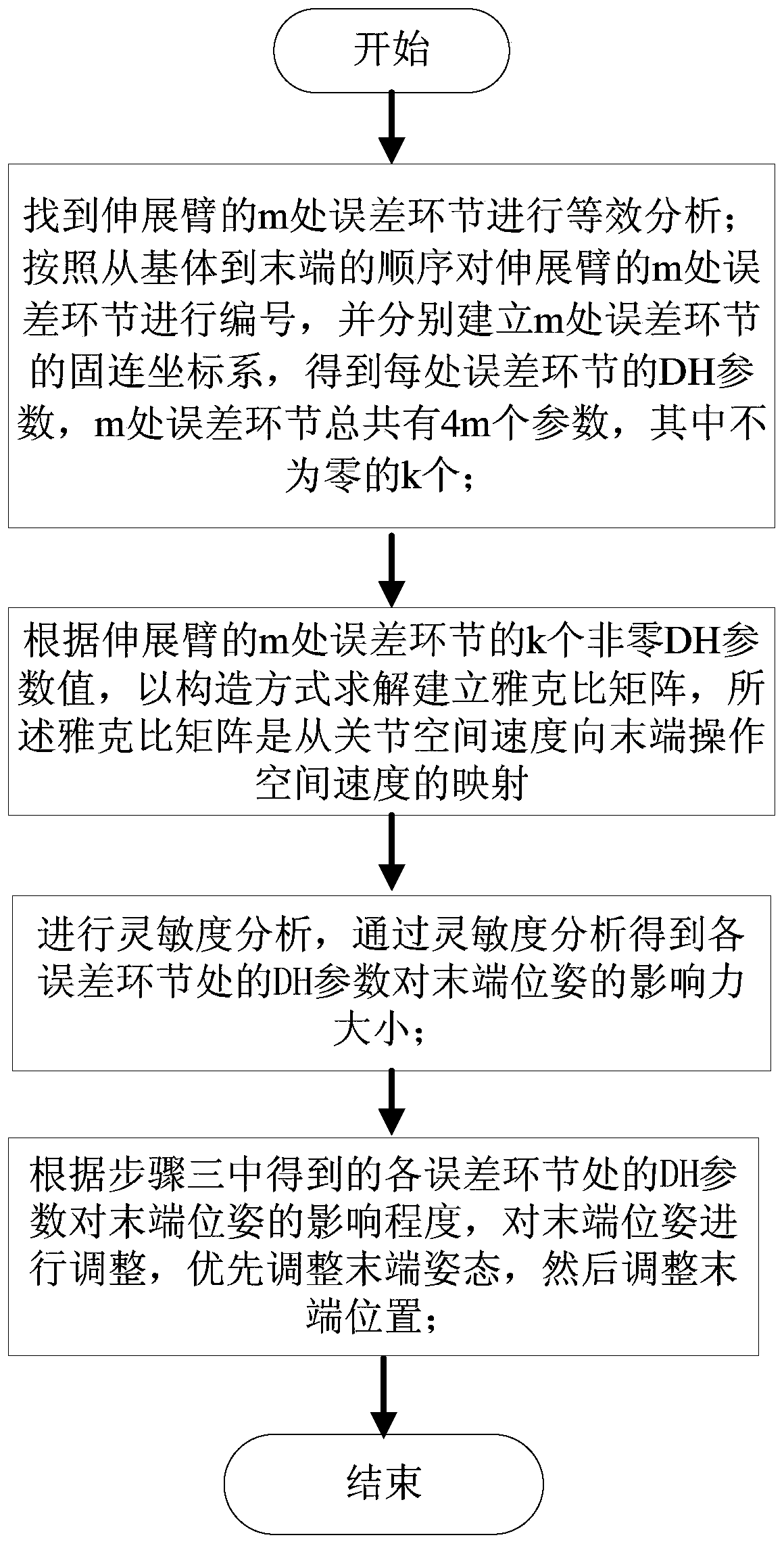
[0015] Specific implementation mode one: combine figure 1 To illustrate this embodiment, the method for adjusting the pose error at the end of the space-borne antenna space extension arm given in this embodiment specifically includes the following steps:
[0016] Step 1. Find the error link at m of the extension arm and perform equivalent analysis. The equivalent analysis means that the error link at m is equivalent to a translational joint or a rotational joint for micro-motion according to the tolerance zone type; The order of the end is to number the error links at m of the extension arm, and establish the fixed coordinate system of the error links at m respectively, and obtain the DH parameters of each error link. of k;
[0017] Step 2: According to the k non-zero DH parameter values of the error link at m position of the extended arm, solve and establish the Jacobian matrix in a constructive manner, and the Jacobian matrix is a mapping from the joint space velocity t...
specific Embodiment approach 2
[0021] Specific implementation mode two: as figure 2 As shown, the difference between this implementation mode and specific implementation mode 1 is that the specific process of step 1 includes:
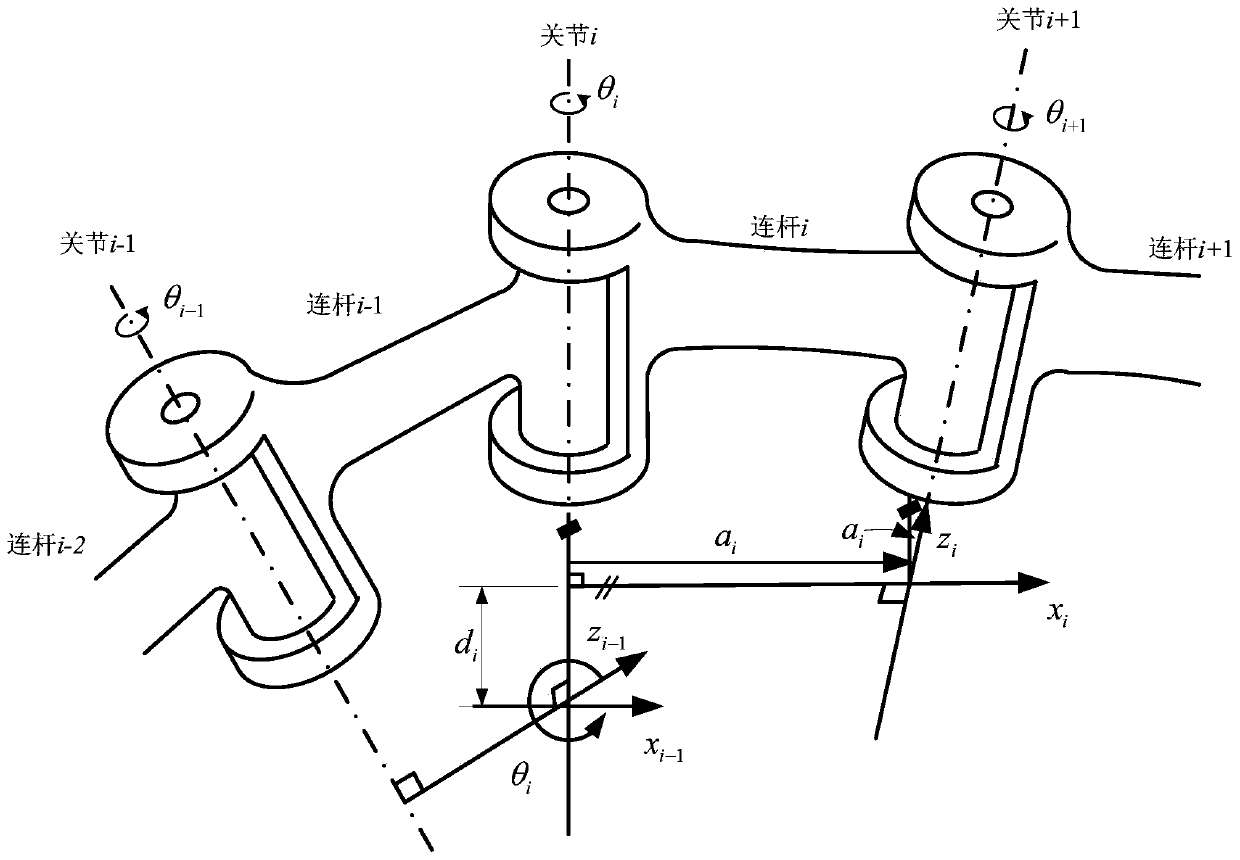
[0022] Find the error link at m of the extension arm for equivalent analysis. According to the type of tolerance zone, the error link at m is equivalent to a translational joint or a rotational joint that performs a small movement; Links are numbered, and the fixed coordinate system of the error link at m is respectively established, and the coordinate system corresponding to the i-th error link is {i}; and the DH parameter {d of the i-th error link is used i ,θ i ,a i ,α i} to represent the relative position and orientation between two adjacent coordinate systems {i-1} and {i}, i=1,...,m, when i=1, the coordinate system {i-1} is the base Coordinate system {o}; where:
[0023] d i is the joint offset of the coordinate system {i}, which means from X i-1 Axis to X i Axis dista...
specific Embodiment approach 3
[0028] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is that the specific process of step two includes:
[0029] Let the adjustable parameter be q j , j∈[1,k];
[0030] If q j The corresponding error link is equivalent to the joint j that performs a small movement as a moving joint, then:
[0031]
[0032] If q j The corresponding error link is equivalent to the joint j that performs small movements as a rotating joint, then:
[0033]
[0034] Among them, v represents the linear velocity at the end of the stretch arm, ω represents the angular velocity at the end of the stretch arm, represents the joint velocity, Indicates the description of the position vector of the origin of the end coordinate system relative to the coordinate system {j} in the base coordinate system {o}, that is is the transformation matrix from the coordinate system {j} to the base coordinate system {o}, p n i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com