Robot online teaching device, system, method and equipment base on reality enhancing
An augmented reality, robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to solve problems such as obstacle collisions and physical robot damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0056] see figure 1 , a robot online teaching device based on augmented reality, comprising a teaching manipulator 1, an orientation tracking sensor 2, a virtual robot model positioner 3, an augmented reality display 4 and a computer 5, the teaching manipulator 1, an orientation tracking sensor 2. The augmented reality displays 4 are all connected to the computer 5; the operator holds the teaching manipulator 1, and the operation data sent by the teaching manipulator 1 is transmitted to the computer 5; the azimuth tracking sensor 2 is used to To detect the feature information on the operator's head and the virtual robot model locator 3, and send the feature information to the computer 5; the virtual robot model locator 3 is used to locate the virtual robot model 16 in the real environment and send it to the computer 5; the computer 5 processes the received data, and sends the processing result to the teaching operator 1 and the augmented reality display 4, and the teaching ope...
Embodiment 2
[0065] key points please refer to figure 2 and image 3 , a robot online teaching system based on augmented reality, including a feed calculation module 7, a robot forward kinematics model 8, a virtual robot rendering module 10 and an orientation tracking module 11;
[0066] The feed calculation module 7 receives the operation data from the teaching manipulator 1 through the communication module 6 in the computer 5 to generate the feed amount of each feed axis of the robot and the control instructions of each action module, and sends it to the Communication module 6, robot forward kinematics model 8 and virtual robot rendering module 10, through said communication module 6, said feed amount and control instructions are sent to said teaching manipulator 1 for display; said feed Quantities include angular displacement or linear displacement;
[0067] The forward kinematics model 8 of the robot calculates the position and attitude of the end point of the robot according to the...
Embodiment 3
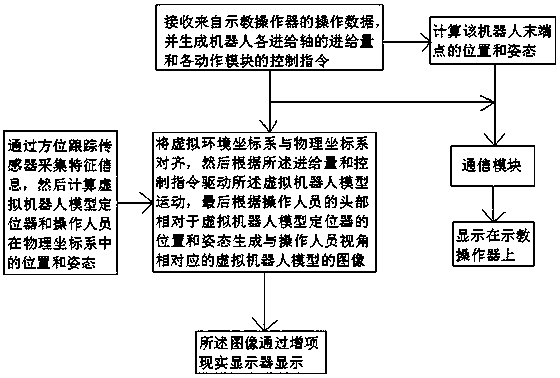
[0075] see image 3 , an online teaching method for a robot based on augmented reality, comprising the following steps:
[0076] Step 1. Receive the operation data from the teaching operator 1 through the communication module 6 in the computer 5, and generate the feed amount of each feed axis of the robot and the control instructions of each action module, and send them to the communication module 6. Send the feed amount and control instructions to the teaching operator 1 through the communication module 6 for display;
[0077] Simultaneously, collect feature information by orientation tracking sensor 2, then calculate the position and attitude of virtual robot model locator 3 and operator in the physical coordinate system; feature information;
[0078] Step 2. Calculate the position and attitude of the end point of the robot according to the feed amount and control instructions, and send the position and attitude data of the end point to the teaching operator 1 through the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com