Lower limb exoskeleton power assisting device and control method thereof
A power-assisted device and control method technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of limited improvement of human sports performance, bulky power system, inconvenient wearing, etc., to achieve human strength and sports performance , reduced volume and production materials, accurate and reliable detection methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] This embodiment is a preferred form of a lower limb exoskeleton assisting device and a control method thereof.
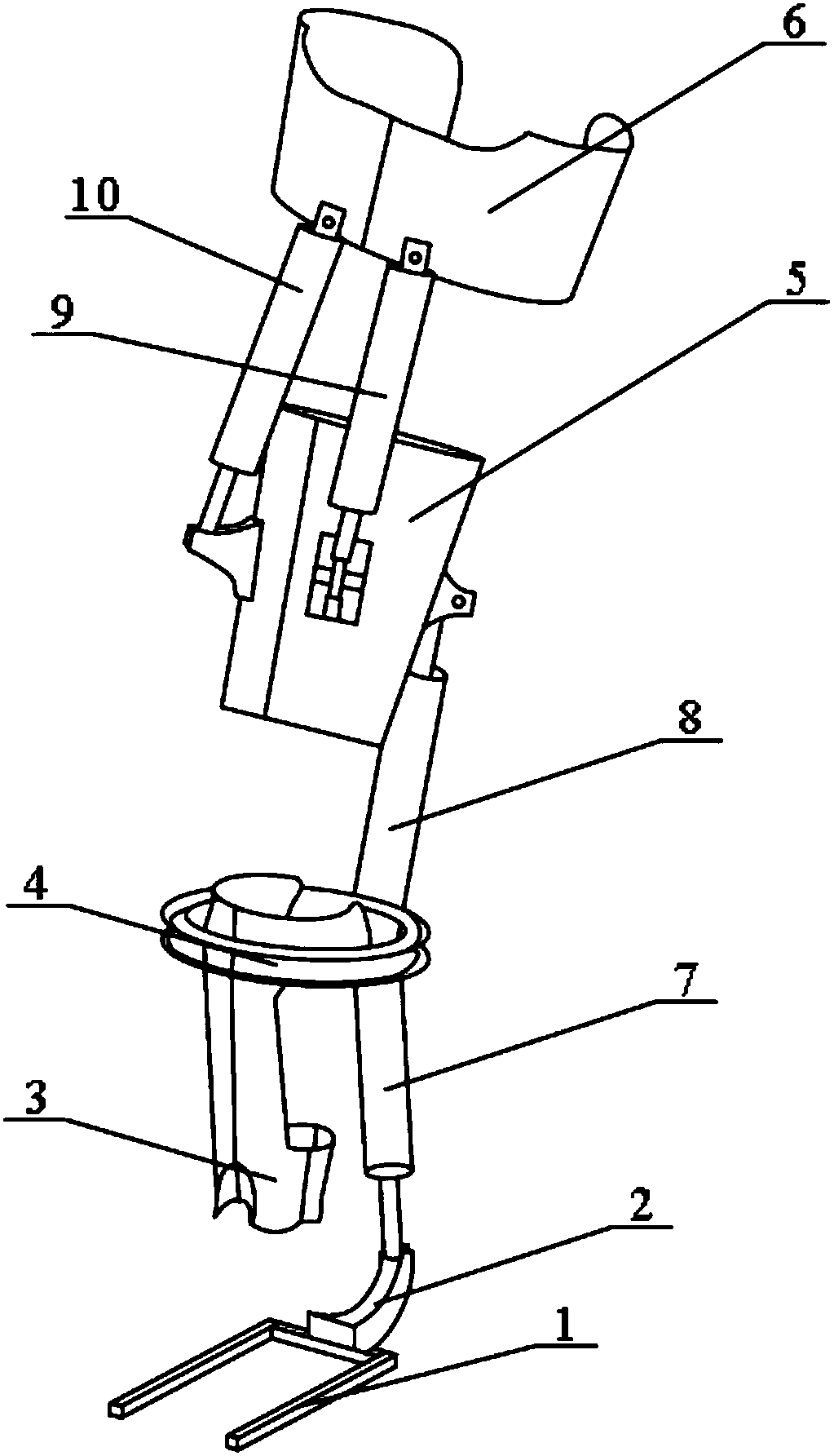
[0053] like figure 1 As shown, the lower limb exoskeleton assisting device in this embodiment includes a left leg assisting device and a right leg assisting device at the same time, and the left leg assisting device and the right leg assisting device have the same structure; each leg The booster devices all include a pneumatic system, a foot fixing part 1, a calf connecting part 2, an ankle fixing part 3, a calf fixing part 4, a thigh fixing part 5, and a thigh root fixing part 6.
[0054] In this embodiment, the foot fixing part 1 is a clamping device that can be embedded in the bottom of the wearer's shoe, and it includes a transverse bar that is fixedly connected with the connecting part of the calf. An inner moving rod that moves and has a limit device. The end of each inner sliding rod is provided with a foot clamping rod connected thereto. Limiting fo...
Embodiment 2
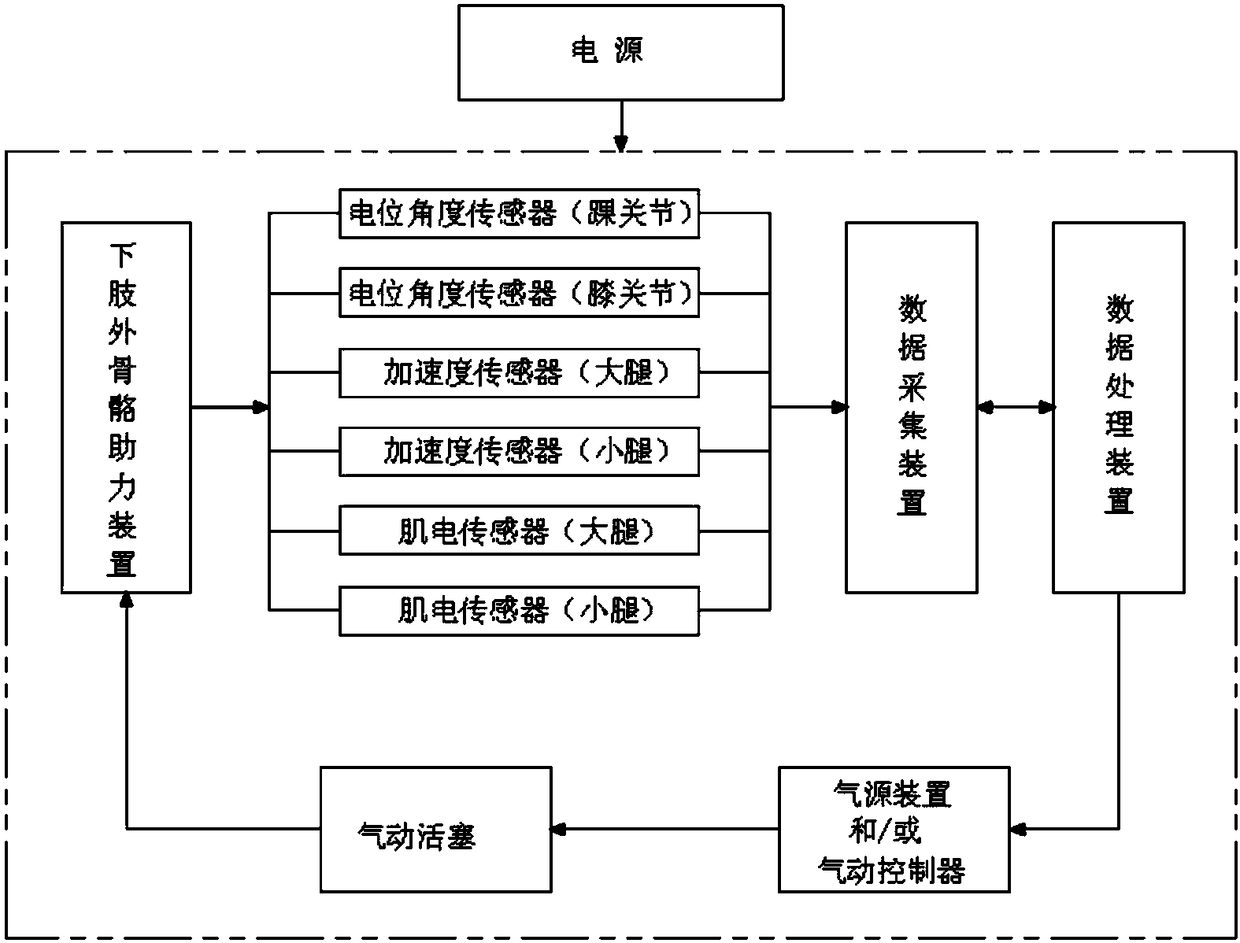
[0063] This embodiment is an alternative embodiment of Embodiment 1. Compared with the booster device in Embodiment 1, this embodiment also includes a control system, and the control system includes at least one sensor, a data acquisition device, and a data analysis device. The data analysis device is used to output the control signal to the pneumatic system. In this embodiment, the sensors used are potential angle sensors, gyroscope acceleration sensors, and EMG myoelectric sensors; the outside of the ankle fixing part 3 is provided with a potential angle sensor for the angle detection of the ankle joint; the thigh The outside of the bottom of the fixing part 5 is provided with a potential angle sensor for the angle detection of the knee joint; the acceleration sensor and the myoelectric sensor close to the thigh wall are arranged on the inside of the middle and upper part of the fixing part 5 of the thigh; The inner side of the fixing part 4 is provided with an acceleration ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com