Unmanned plane formation flight method and system based on binocular visual sense
A binocular vision, formation flight technology, applied in the field of computer vision and flight control, can solve the problems of easy damage, GPS signal loss, waste of resources, etc., to achieve the effect of accurate control and high measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
[0029] The embodiment of the present invention provides a drone formation flying method based on binocular vision, including:
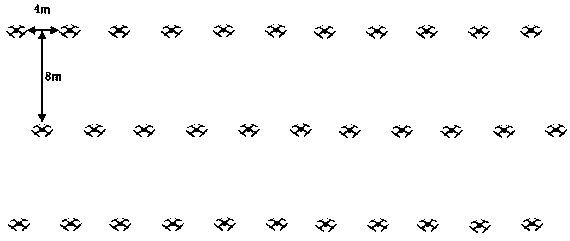
[0030] S1. The lead plane leads the wingman to take off and takes off from the ground in a specific formation, such as figure 2 As shown, flying to the work site under the leadership of the lead plane, the binocular camera on the lead plane takes a photo of the wingman;
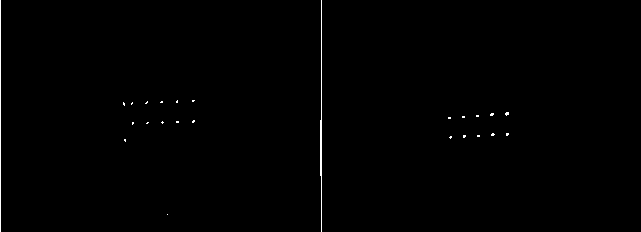
[0031] S2. The onboard computer on the long machine collects the photo, and the onboard computer performs color channel separation and thresholding processing on the photo to obtain a binary image;
[0032] S3. The onboard computer extracts the contour of the binary image, and extracts the contour of the infrared LED lamp on the binary image;
[0033] S4. The on-boar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com