Multi-sensor tunnel positioning system and positioning method thereof
A multi-sensor, positioning system technology, applied in instrumentation, navigation, mapping and navigation, etc., to achieve the effect of reducing equipment cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with drawings and embodiments.
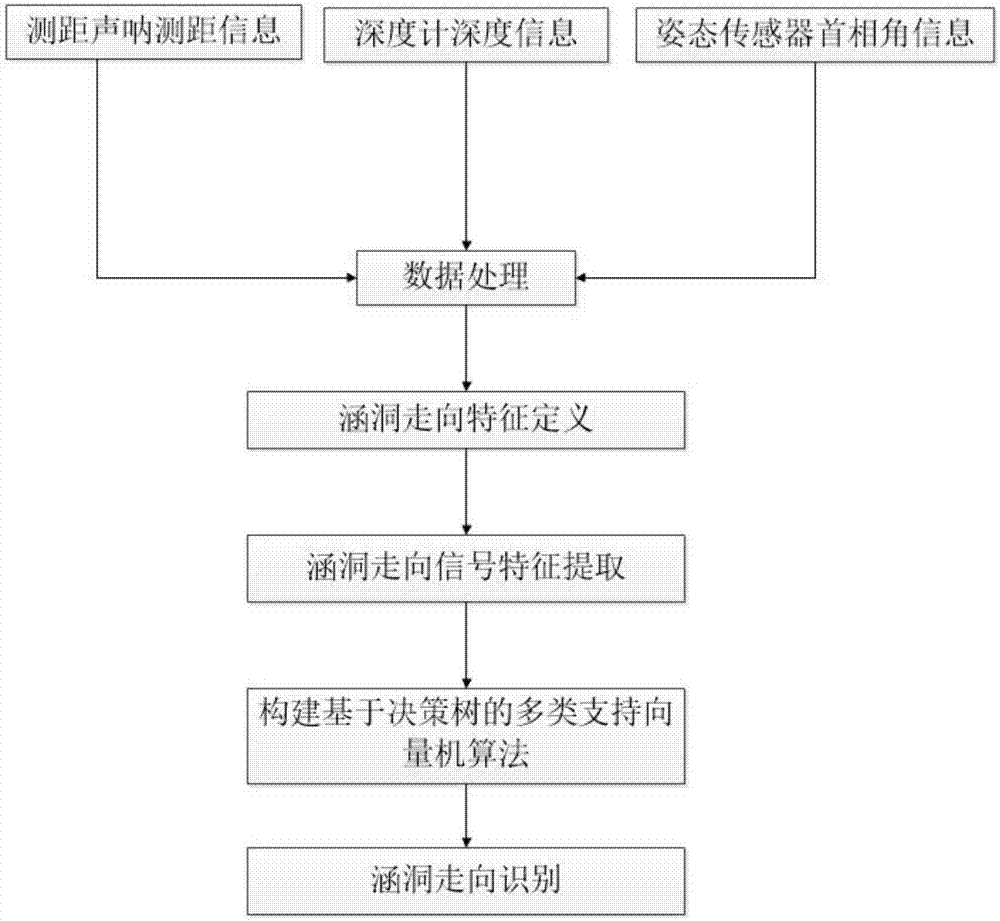
[0038] refer to figure 1 The invention provides an underwater multi-sensor positioning system for a tunnel, including: the distance information from the sonar to the cave wall can be obtained by using the ranging sonar; the prime angle information of the robot can be obtained by using the attitude sensor; depth information.
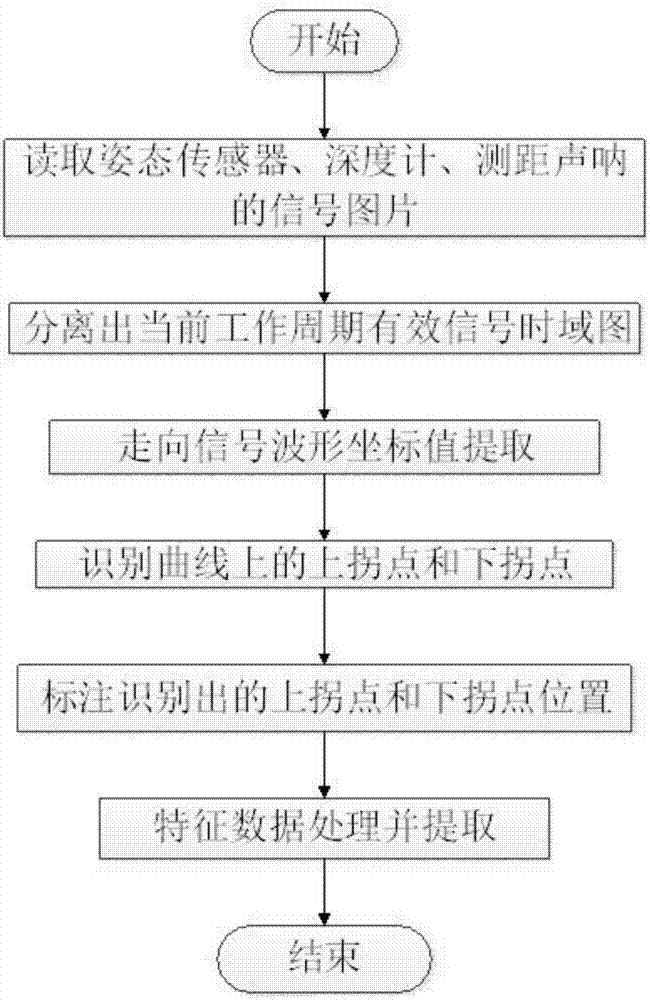
[0039] Combine below Figure 2-6The working process of the underwater multi-sensor tunnel positioning method of the present invention will be described.
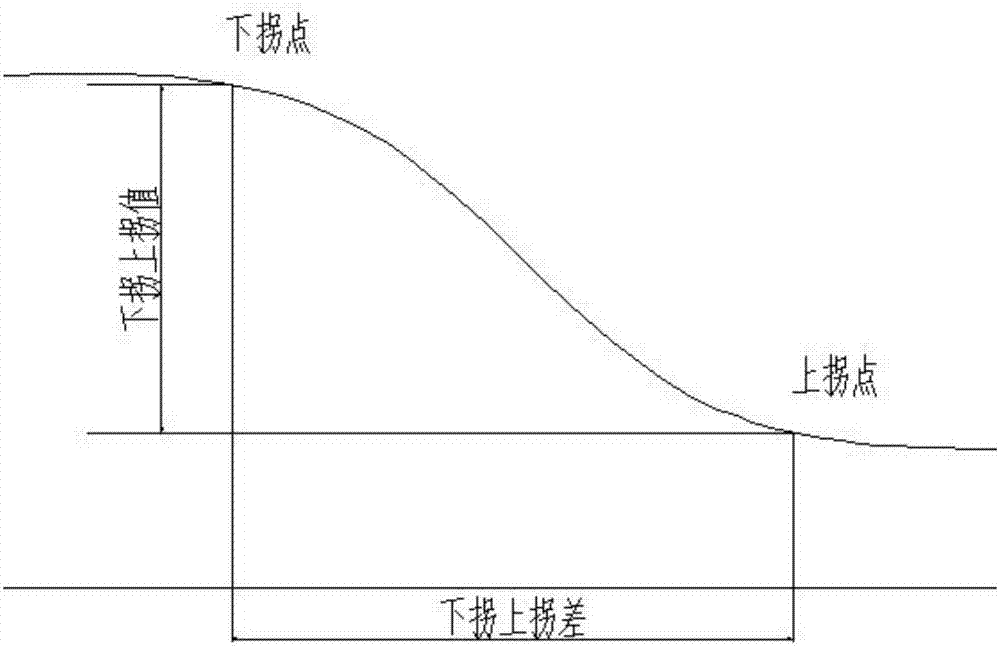
[0040] Tunnel direction characteristic signal extraction:
[0041] refer to figure 2 , using four ranging sonars at the bow and tail of the robot to measure the distance information from the sonar to the wall, and average the distance information of the four ranging sonars before and after, so as to suppress the impact caused by the movement of the robot in the pipeline. Interference genera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com