Snakelike robot kinetic analysis method based on spinor theory and Kane method
A snake-like robot and dynamic analysis technology, applied in the field of robot research and engineering, can solve the problems of insufficient simplicity and beauty of the dynamic model, insufficient calculation efficiency, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
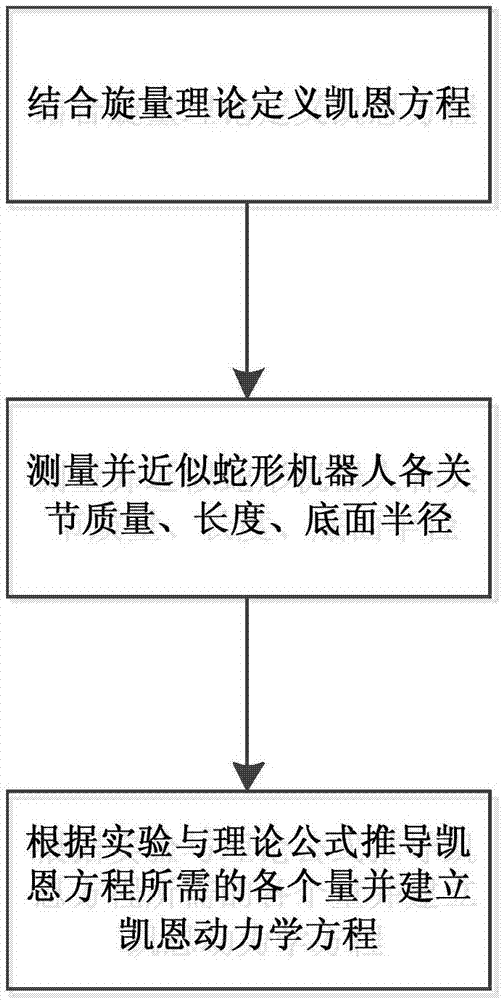
[0073] This embodiment provides a method for analyzing the dynamics of a snake-like robot based on the screw theory and the Kane method. The flow chart of the method is as follows figure 2 shown, including the following steps:
[0074] S1. Combining the screw theory to define the Kane equation of the snake robot;
[0075] The Kane equation uses the concept of pseudo-coordinates (pseudo-velocity), and needs to use generalized velocity instead of generalized coordinates to describe the motion of the system. In the specific modeling process, it is necessary to select appropriate pseudo-coordinates according to the actual situation of the system to simplify the analysis and analysis in actual engineering. calculate.
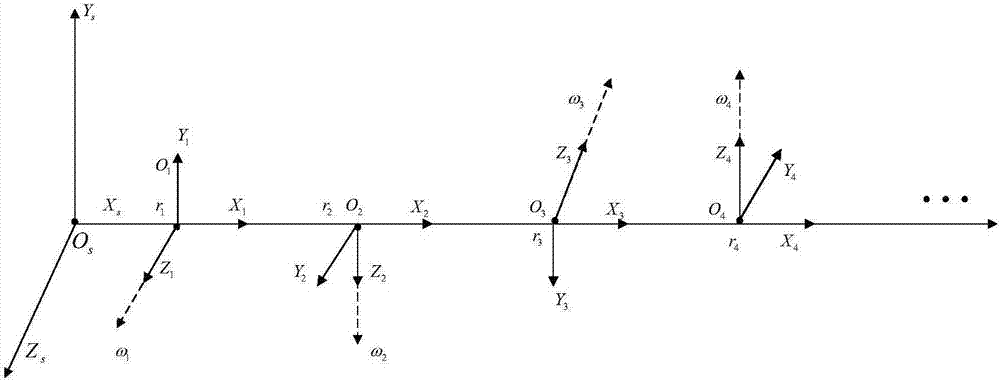
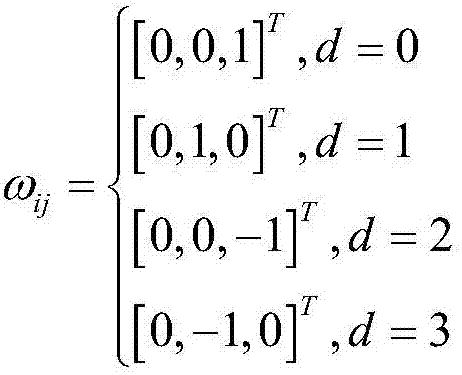
[0076] Next, according to the actual structure of the snake-like robot, combined with the representation of the screw theory kinematic equations, the appropriate pseudo-velocity is selected.
[0077] For an orthogonal joint snake robot with any n degrees of freedo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com