Thumb far knuckle driver
A driver and thumb technology, applied in the field of micro-device, can solve the problems of high price, complicated system and difficult maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
[0007] Specific implementation mode one: as image 3 As shown, the thumb far knuckle driver includes a driving part 111, and the driving part 111 includes a motor 40 and a clutch device, and the clutch device is composed of a clutch device friction plate 41, a friction plate slide bar 42, a return tension spring 43, The clutch device cover 44 is composed of the friction disc slide bar 42 fixedly connected to the shaft of the motor 40, the two clutch device friction discs 41 are inserted into the two ends of the friction disc slide bar 42 respectively, and the two clutch device friction plates 41 are connected with a return Extension spring 43, clutch device cover 44 is inserted into the shaft of motor 40, is sliding contact between the shaft of clutch device cover 44 and motor 40, and clutch device cover 44 is provided with transmission gear. Action implementation process: when the rotation speed of the motor 40 is higher than a certain value, the two friction plates 41 of the...
specific Embodiment approach 2
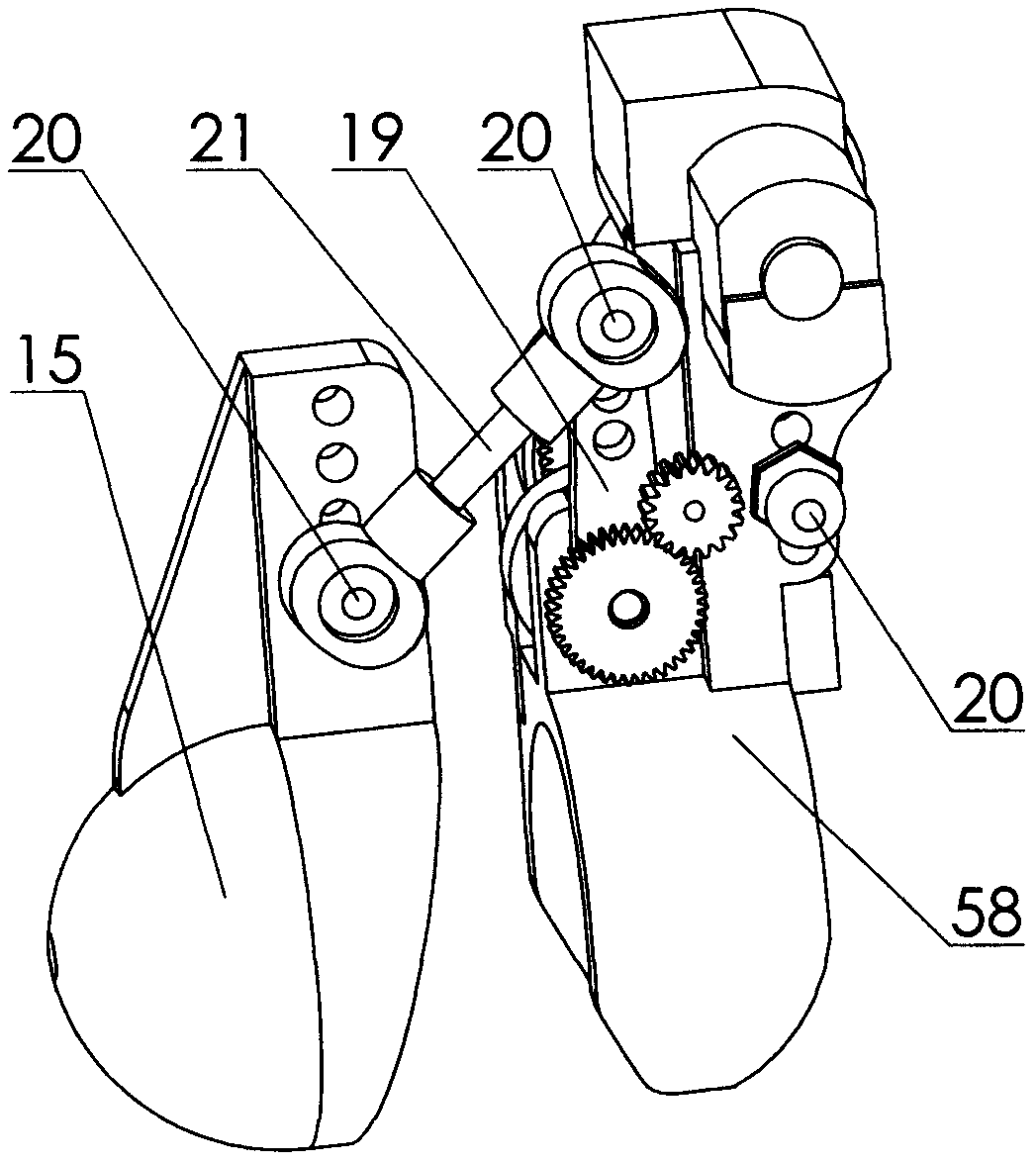
[0008] Specific implementation mode two: as figure 2 and image 3 As shown, the joint detection driving mechanism 100 includes a driving component 111 , a potentiometer 18 , a rocker arm 19 , a gear case cover 57 and a knuckle base 58 . The knuckle base 58 is provided with a hole seat P and a row of mounting holes R for the screws 24, the potentiometer 18 is fixed in the hole seat P of the knuckle base 58 by screws 36, the hole seat The shaft of the potentiometer 18 in the P is fixedly connected with the rocker arm 19 by a screw 35, the gear axis on the rocker arm 19 coincides with the axis of the rocker arm rotation, and the gear of the rocker arm 19 passes through the reduction gear set 60. Cooperate with the gear of the driving part 111 , the driving part 111 is installed on the knuckle base 58 , and the other end of the rocker arm 19 is fixedly connected to the ball head 20 .
specific Embodiment approach 3
[0009] Specific implementation mode three: as figure 1 , figure 2 and image 3 As shown, the far knuckle base 15 is fixed on the far knuckle position of the human hand. One end of the far knuckle base 15 is cylindrical surrounding the far knuckle, and the other end is hemispherical. The longitudinal section of the whole base It is "U"-shaped, with the opening facing the distal interphalangeal joint (DIP), and a rocker arm is arranged at the position where the base is located on the back of the far knuckle, and the rocker arm is perpendicular to the back of the knuckle where it is located. The rocker arm 19 of the joint detection drive mechanism 110 at the middle phalanx is connected to the base 15 of the distal phalanx through a spherical hinge that cooperates with a ball joint 20 and a ball joint connecting rod 21 . Action implementation process: When the operator’s distal interphalangeal joint (DIP) performs flexion and extension movements, the distal knuckle base 15 atta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com