Networking method supporting distributed attitude synchronous control of multiple moving objects
A technology for synchronous control and moving bodies, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems that restrict the scientific research and application promotion of multi-moving body synchronous control technology, increase the cost of use, etc., to ensure that it can be implemented performance, improved reliability, and convenient control mode effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
experiment example
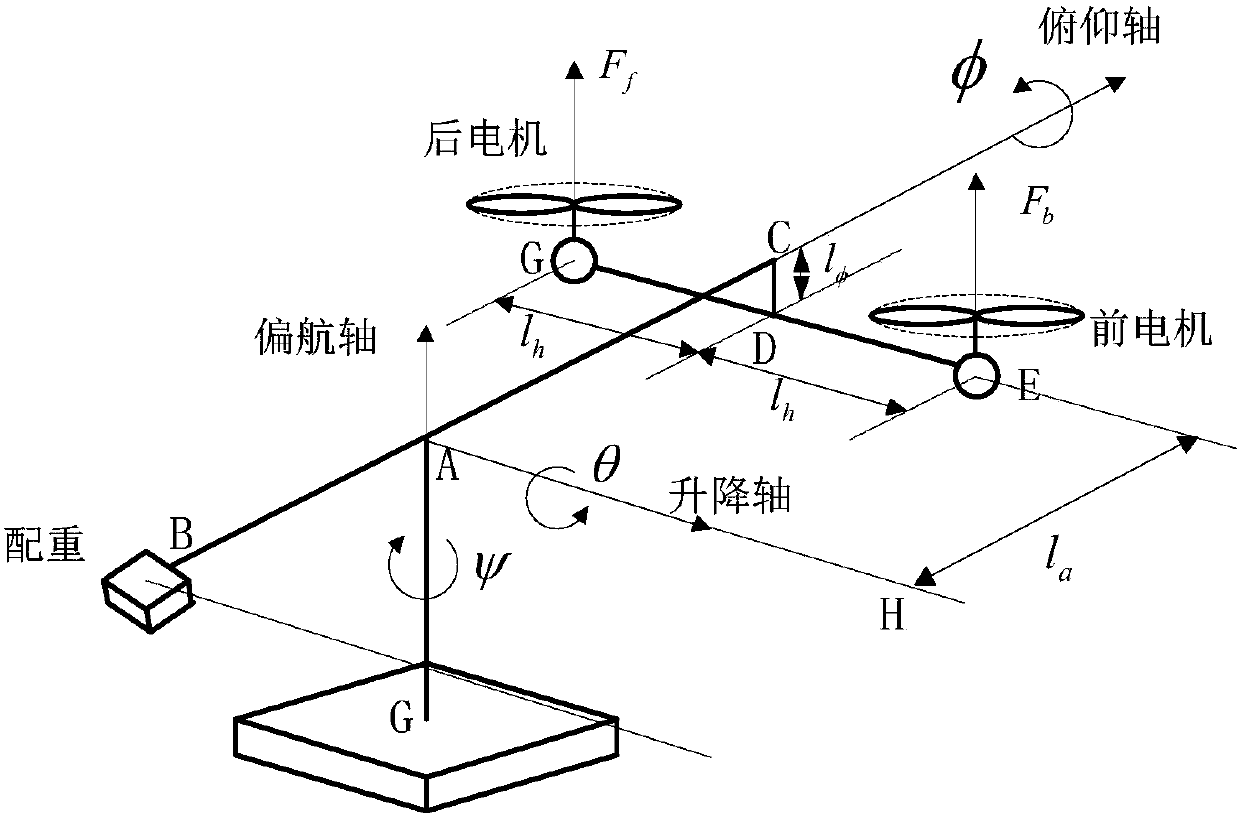
[0032] The networking method of the present invention is used for the networking of multiple three-degree-of-freedom helicopter simulators, wherein the three-degree-of-freedom helicopter simulator can simulate the flight attitude in the actual flight mission, and it has three degrees of freedom, respectively around the pitch axis The pitch angle of rotation (pitch), the elevation angle (elevation) of rotation around the lifting axis, and the heading angle (travel) of rotation around the yaw axis. When the speed of the front and rear motors increases or decreases at the same time, the lift angle will change. When the front and rear motors rotate at a differential speed, the pitch angle will change, and then drive the balance bar to generate a yaw moment to change the yaw angle. The model of the three-degree-of-freedom helicopter simulator is as follows figure 1 As shown in , the solid line represents the reference signal, which is the expected value of the attitude of the three...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com