Method for detecting fruit target in using apple pick-up robot based on deep learning
A picking robot and target detection technology, which is applied to instruments, computer components, character and pattern recognition, etc., can solve problems such as interference, image noise, machine vision system detection and difficulty in approaching fruits, etc. Effects of stickiness and generalization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
[0019] A kind of apple picking robot fruit target detection method based on deep learning of the present invention, specifically comprises the following steps:
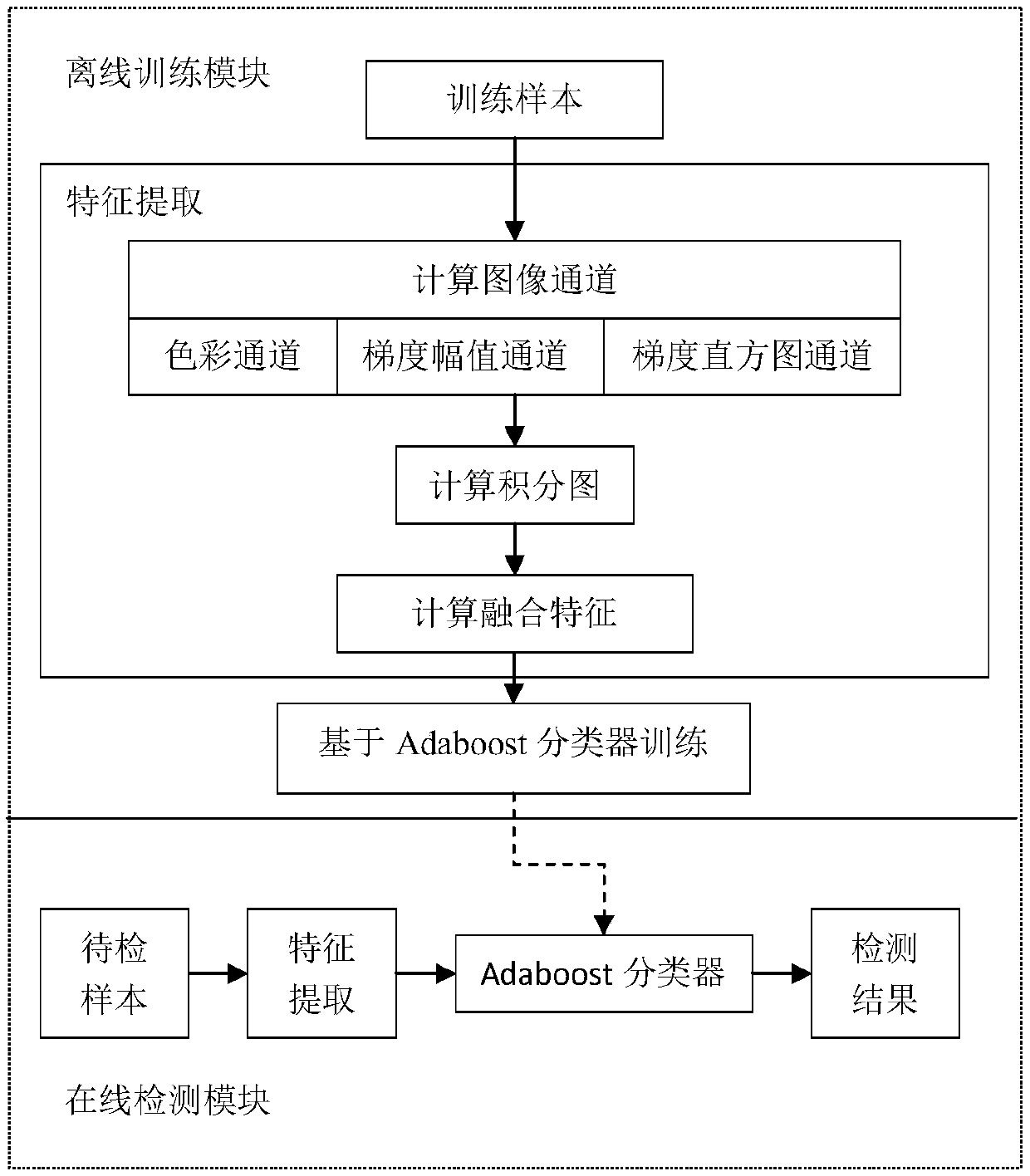
[0020] Step 1 (sample data collection): Go to the apple plantation during the apple harvest season, use the camera carried by the mobile intelligent robot, select as many angles as possible, and take pictures of the fruit trees under the conditions of forward light and backlight respectively. Cut the apple fruit part in the picture into positive samples of uniform size, and crop the part without apple fruit into negative samples of uniform size. The number of positive samples and negative samples should be at least 5000.
[0021] Step 2 (extract fusion features): Use the image function in matlab to extract RGB or LUV color components, and extract the edge gradient information of the detection target through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com