Visual shape model-based robot multi-target recognition method
A shape model and recognition method technology, applied in character and pattern recognition, instruments, computer components, etc., can solve the problems of robot flexibility and low intelligence level, and achieve improved similarity measurement methods, optimized data structures, and high robustness sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The method of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments of the present invention.
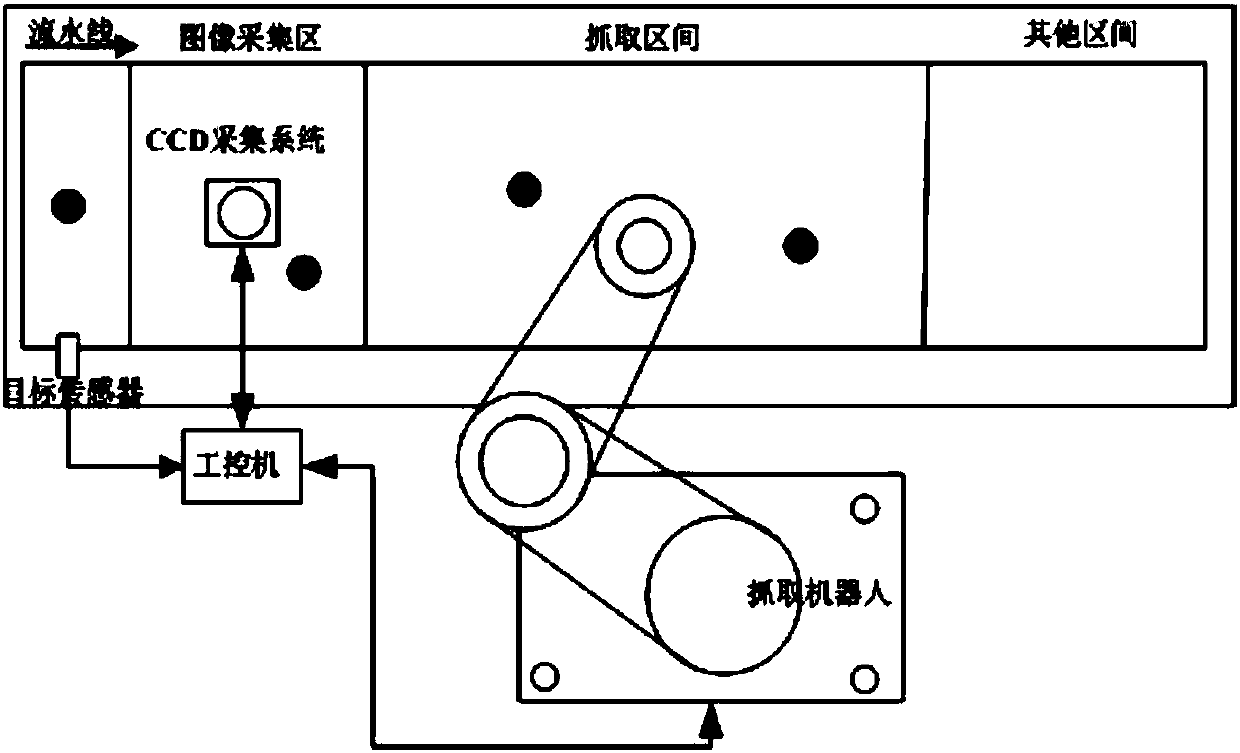
[0065] figure 1 It is a schematic diagram of the hardware structure of the existing vision-guided robot recognition system.
[0066] Such as figure 1 As shown, the industrial camera is installed at a predetermined process position, which is the image acquisition area, and the target is sensed by the target sensor to trigger the camera to capture images. The middle interval is defined as the working area of the robot, and the position information of the target in the grasping interval is obtained by the multi-target recognition algorithm and the encoder feedback of the method of the present invention, and the position coordinates are converted into the attitude control information of the robot, finally realizing the accurate grasping of the dynamic target .
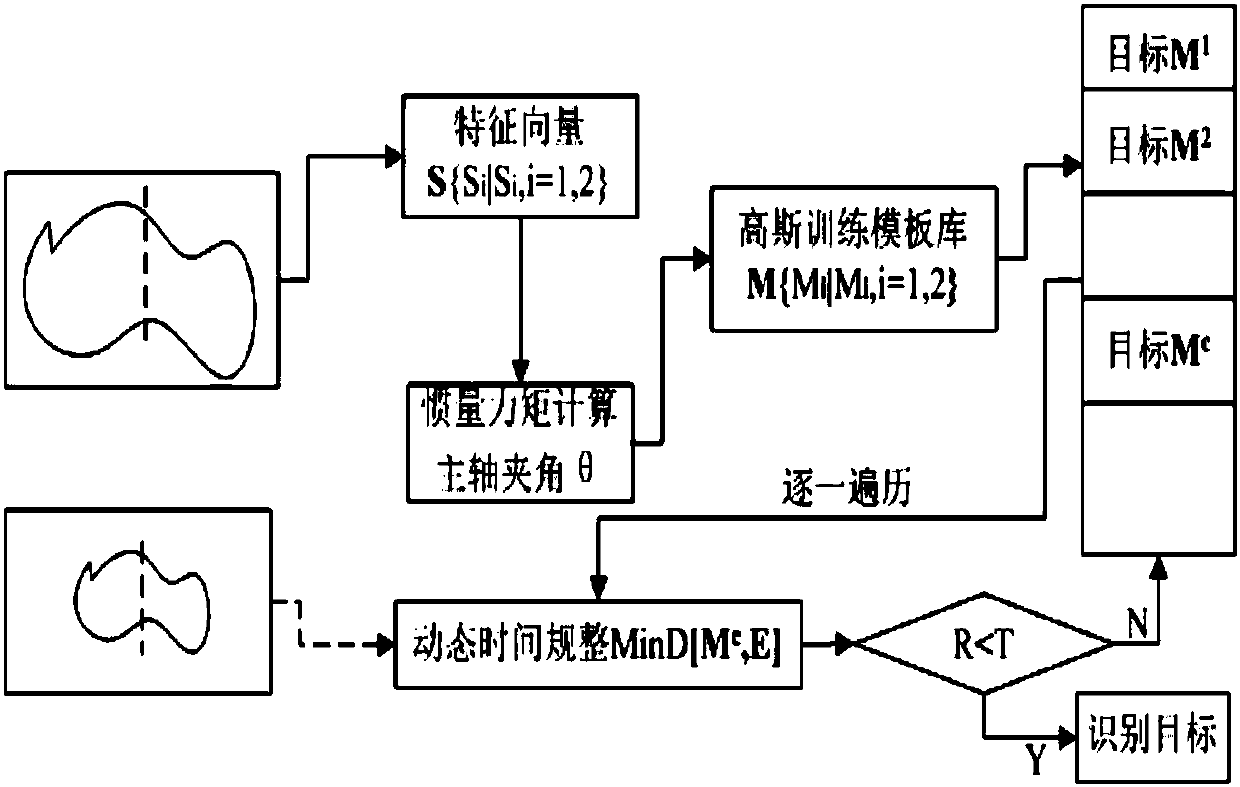
[0067] figure 2 It is a schematic flow c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com