Dynamic obstacle avoidance control method based on laser radar
A technology of laser radar and control method, which is applied in two-dimensional position/channel control and other directions, can solve the problem of being unable to avoid obstacles quickly, achieve the effect of reducing the amount of calculation, satisfying real-time obstacle avoidance, and ensuring real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
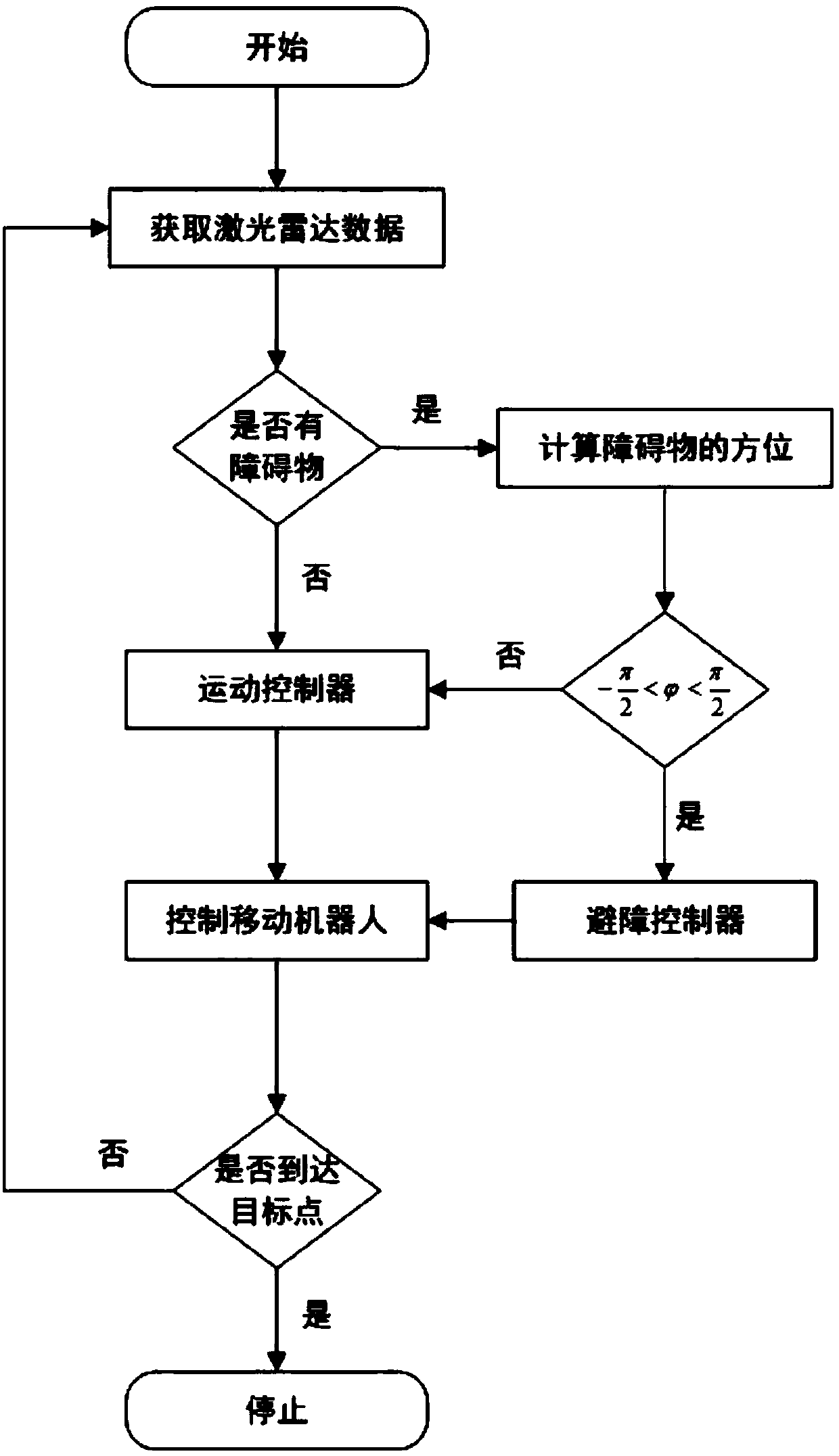
[0028] A kind of dynamic obstacle avoidance control method based on lidar of the present invention, concrete process is as follows:
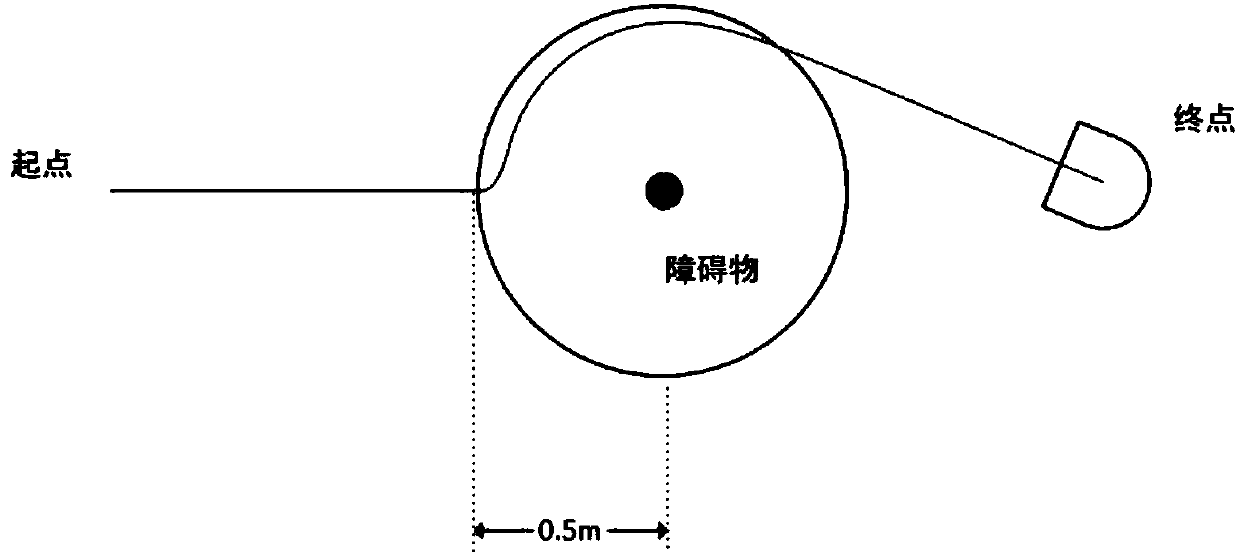
[0029] Step 1: The present invention uses laser radar to record the distance data D of obstacles at various angles within a scanning cycle L ,D L Contains 360 data, from 0° to 359°, record the obstacle distance in each direction sequentially. If the obstacle distance is greater than the measurement azimuth of the lidar, the obstacle distance in this direction is infinite. Note the safe distance L of the mobile robot s = 0.5m. If it is judged that the current lidar data contains a value smaller than the safety distance, construct the obstacle point set D S :
[0030] D. S ={(180°,0.49),(181°,0.47),(182°,0.45),(183°,0.43),
[0031] (184°,0.41),(185°,0.43),(186°,0.45),(187°,0.47),(188°,0.49)}
[0032] Exec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com