Method of planning three dimensional route of unmanned plane by means of improved artificial fish swarm algorithm
An artificial fish swarm algorithm and UAV technology, applied in the field of UAV threat prediction, can solve the threat assessment without considering the influence of time factors, the high complexity of the UAV trajectory planning algorithm, and the re-planning of the trajectory. It does not meet the actual impact and other problems, and achieves the effect of meeting the actual track planning requirements, improving the search ability, and reducing the complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
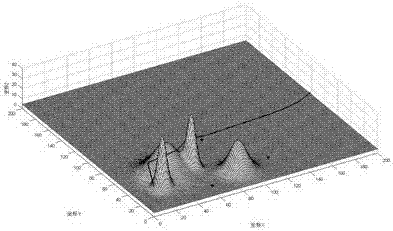
[0034] The present invention will be further described in detail in conjunction with the accompanying drawings, theoretical analysis and simulation experiments. The invention proposes a method for planning a three-dimensional track of an unmanned aerial vehicle by using an improved artificial fish swarm algorithm. Construct digital maps through terrain models and simplified threat models, and realize spatial segmentation based on fence adaptive algorithms; apply improved artificial fish swarm algorithm to realize static track planning; construct threat prediction models based on dynamic Bayesian, to deal with sudden threats Make predictions, consider UAV flight parameters, obtain the re-planning starting point, and apply the improved artificial fish algorithm to realize dynamic re-planning of the trajectory. Specific steps are as follows:
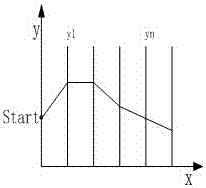
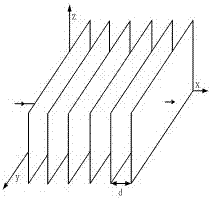
[0035] Step S1: Construct a digital map, and realize spatial segmentation according to the fence adaptive algorithm. details as follows:...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com