Method for controlling take-off pull-up of unmanned aerial vehicle based on robust servo
A servo control and unmanned aerial vehicle technology, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as excessive lift off the ground, excessive pitch angle overshoot, and the nose cannot be pulled up. Achieve the effect of reducing overshoot, reducing overshoot, and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
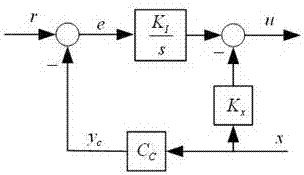
[0037] like Figures 2 to 5 As shown, a method for taking off and pulling up of a UAV based on robust servo control includes a control structure using robust servo, and the control structure includes an inner loop and an outer loop; the inner loop is a pitch rate control loop , the pitch angle rate control loop adopts a pitch angle rate deviation integral and a pitch angle rate damping control structure; the outer loop is a pitch angle control loop, and the pitch angle control loop adopts a pitch angle deviation proportional control structure.
[0038] The outer loop adopts pitch angle proportional control, and the inner loop adopts pitch angle rate integral control. Compared with the classic attitude pull-up control, there is an additional pitch angle rate control loop, which can effectively solve the problem of UAV pulling up during take-off. Problems such as excessive overshooting and overshooting of the pitch angle can improve the response characteristics of the vertical i...
Embodiment 2
[0040] like Figures 2 to 5 As shown, a method for taking off and pulling up of a UAV based on robust servo control includes a control structure using robust servo, and the control structure includes an inner loop and an outer loop; the inner loop is a pitch rate control loop , the pitch angle rate control loop adopts a pitch angle rate deviation integral and a pitch angle rate damping control structure; the outer loop is a pitch angle control loop, and the pitch angle control loop adopts a pitch angle deviation proportional control structure.
[0041] The pitch rate control loop:
[0042]
[0043] The pitch angle control loop:
[0044]
[0045] When the head-up moment of the UAV is too large, the pitch rate Q is greater than the command value Q of the pitch rate control law g , the pitch angle rate Q pull-up control law will pull out the rudder to suppress the UAV pull-up speed, reducing the overshoot of the pitch angle θ and the variation range of the ground-off angle ...
Embodiment 3
[0050] like Figures 2 to 5 As shown, a method for taking off and pulling up of a UAV based on robust servo control includes a control structure using robust servo, and the control structure includes an inner loop and an outer loop; the inner loop is a pitch rate control loop , the pitch angle rate control loop adopts a pitch angle rate deviation integral and a pitch angle rate damping control structure; the outer loop is a pitch angle control loop, and the pitch angle control loop adopts a pitch angle deviation proportional control structure.
[0051] The pitch rate control loop:
[0052]
[0053] The pitch angle control loop:
[0054]
[0055] When the head-up moment of the UAV is too large, the pitch rate Q is greater than the command value Q of the pitch rate control law g , the pitch angle rate Q pull-up control law will pull out the rudder to suppress the UAV pull-up speed, reducing the overshoot of the pitch angle θ and the variation range of the ground-off angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com