Method and system for reducing the influence of non-motor vehicles on the control efficiency of plane perception signals
A non-motor vehicle and signal sensing technology, applied in the field of intelligent transportation, can solve the problems of different traffic conditions and poor control effect of signal lights.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
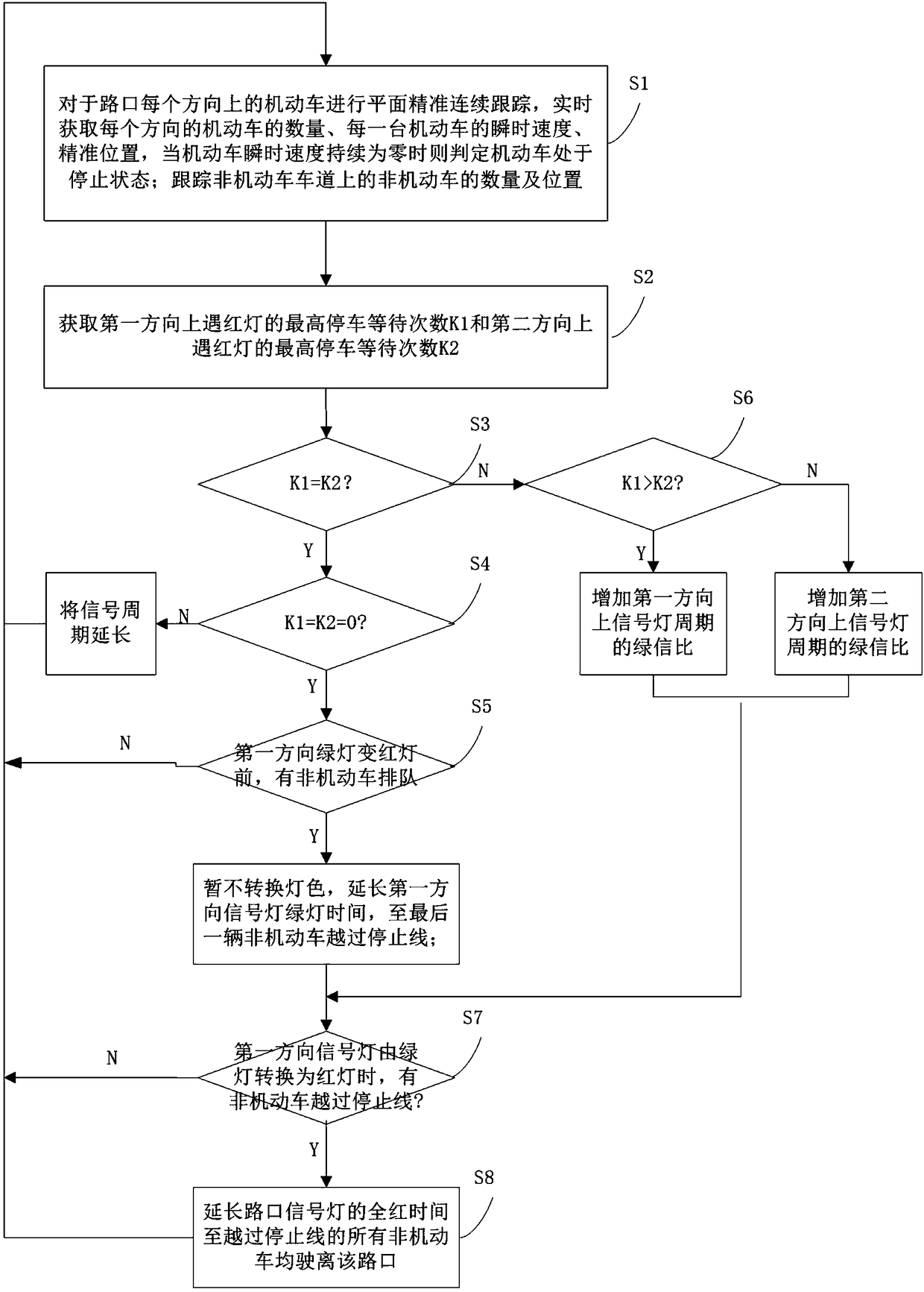
[0085] This embodiment provides a method for reducing the impact of non-motor vehicles on the control efficiency of plane perception signals, such as figure 1 shown, including the following steps:
[0086] S1: Plane accurate and continuous tracking of motor vehicles and non-motor vehicles in each direction of the intersection, and obtain the number and precise position of motor vehicles in each direction in real time;
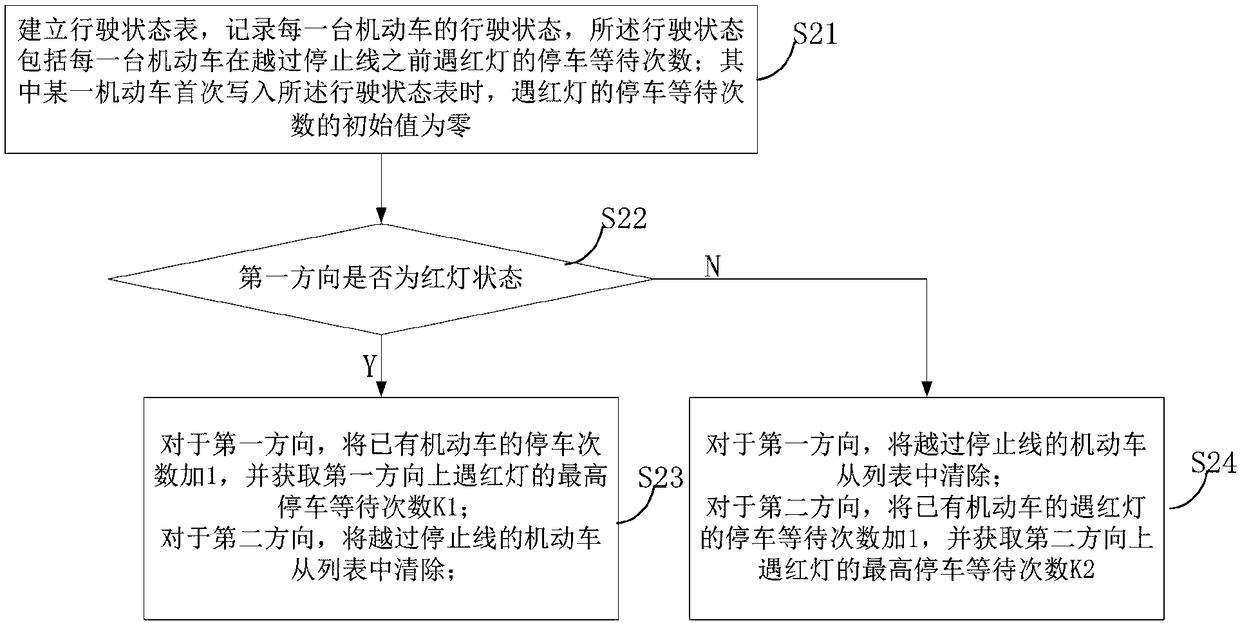
[0087] S2: Obtain the highest number of waiting times K1 for stopping when encountering a red light in the first direction and the highest number K2 for waiting for stopping when encountering a red light in the second direction;
[0088] S3: Determine whether the highest number of waiting times for stopping at a red light in the first direction is equal to the highest number of waiting times for stopping at a red light in the second direction, if they are equal, go to step S4, otherwise go to step S7;
[0089] S4: Judging whether the maximum number of times of...
Embodiment 2
[0111] In this embodiment, on the basis of Embodiment 1, the following improvements are made. The precise and continuous tracking of the plane described in step S1 includes the following steps:
[0112] S11: set several plane detectors on the intersection, the plane detectors are used to continuously track motor vehicles; mark the detection range of the detectors, the upstream section of the signal light, and the downstream section of the signal light on the electronic map with latitude and longitude , and the position coordinate data of the detector (X j ,Y j ), the position coordinate data of the signal light (X x ,Y x ) marked on the electronic map;
[0113] S12: Obtain the current detection error of the detector (X c ,Y c ), judge the current detection error (X c ,Y c ) is within the set threshold range, if so, then enter step S13, otherwise an alarm signal is sent, indicating that the coordinate data of the correction marker position cannot be accurately obtained, ...
Embodiment 3
[0139] like Image 6 As shown, this embodiment provides a device for reducing the impact of non-motor vehicles on the control efficiency of the plane perception signal, including:
[0140] Tracking unit 1: Carry out plane accurate and continuous tracking of motor vehicles and non-motor vehicles in each direction of the intersection, and obtain the number and precise position of motor vehicles in each direction in real time;
[0141] Acquisition unit 2 for the number of stops: obtain the highest number of waiting times K1 for stopping when encountering a red light in the first direction and the highest number K2 for waiting for stopping when encountering a red light in the second direction;
[0142] The first judging unit 3: judging whether the highest number of waiting times for stopping at a red light in the first direction is equal to the highest number of waiting times for stopping at a red light in the second direction;
[0143] The second judging unit 4: judging whether ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com