Mechanical arm
A robotic arm and drive control technology, applied in the field of bionic robotic arms, can solve the problems of difficult control, unstable operation of the device, unsuitable for anthropomorphic use, etc., and achieves the effect of reducing costs and facilitating control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
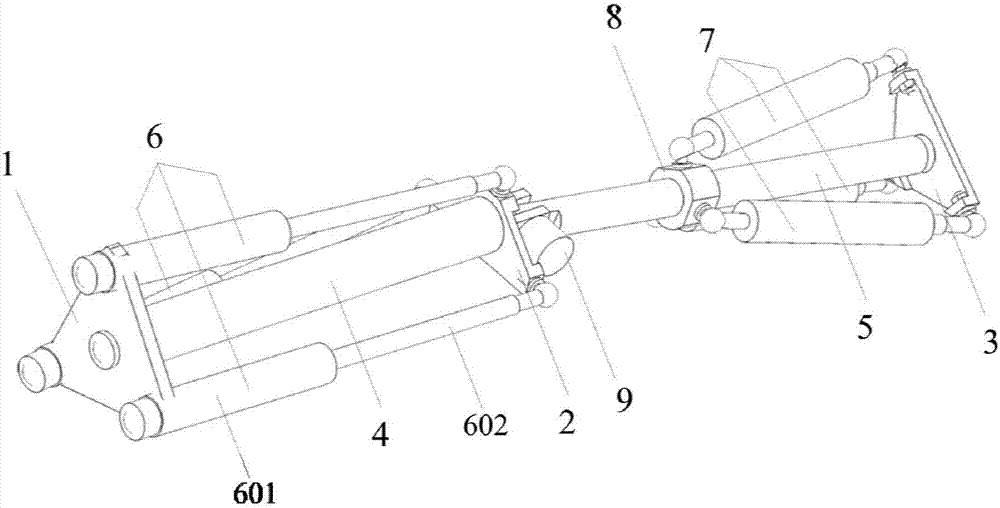
[0033] Such as figure 1 As shown, this embodiment provides a mechanical arm structure imitating the design of the human arm, including three independent joints designed according to the movement of the human arm, including shoulder, elbow, and wrist, wherein the position of the first platform 1 is the shoulder joint, imitating the human arm The shoulder design has three independent degrees of freedom of rotation; the position of the second platform 2 is the elbow joint, which can rotate around the only central rotation axis, including an independent degree of freedom; the position of the third platform 3 is the wrist joint, Like the shoulder joint, it has three independent degrees of freedom of rotation. The robotic arm as a whole includes 7 independent degrees of freedom, which is flexible and efficient, and has excellent bionic motion effects.
[0034] 1.1 Shoulder joint:
[0035] In the robotic arm provided in this embodiment, the movement of the shoulder joint is compose...
Embodiment 2
[0054] This embodiment provides a simplified form of the mechanical arm in Embodiment 1, its structure is as follows figure 2 shown. Wherein, the third platform 3 of the wrist is connected to the second arm 5 through a ball joint, and the third platform 3 can rotate around the ball joint at the joint. The third platform 3 is connected with two sets of second driving control parts 7 through a ball joint. The mechanical arm provided in this embodiment can jointly determine the spatial pose of the third platform 3 of the wrist through the length changes of the two sets of second driving control parts 7 , and the rotation of the third platform 3 has two degrees of freedom.
[0055] In other preferred embodiments of the present invention, the driving control parts of the wrist and the shoulder are hydraulic cylinders, wherein the translation part is a hydraulic cylinder piston, and the driving part is a cylinder body of the hydraulic cylinder. There is hydraulic oil in the cylin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com