Bearing-only underwater target tracking algorithm based on multilevel information fusion
An underwater target and tracking algorithm technology, applied in radio wave measurement systems, instruments, etc., can solve the problem of target tracking accuracy reduction and achieve high filtering accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
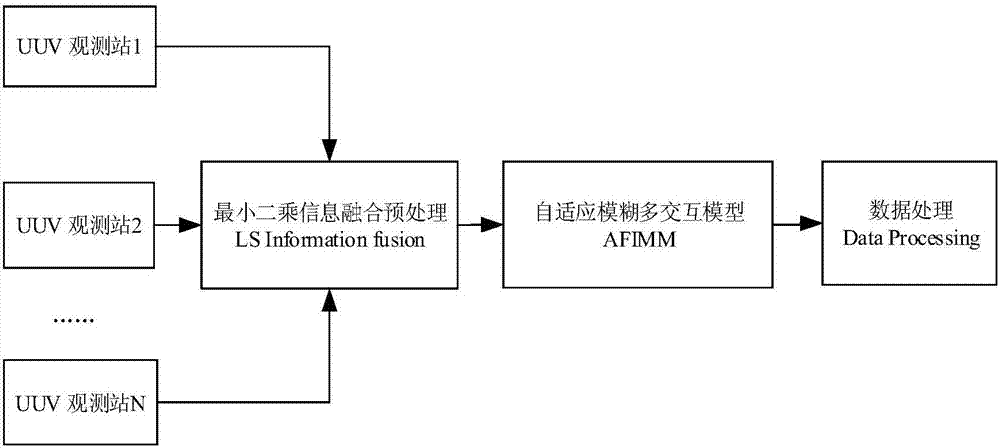
[0059] This embodiment studies the target tracking problem in the process of multi-UUV cooperative operations, and designs a multi-level information fusion azimuth-only underwater target tracking algorithm LS-AFIMM-PF. The first layer uses the least square method (Least Square, LS) to initially track and locate the target, and calculates its estimated state value as the input value of the second layer AFIMM; the second layer designs a fuzzy adaptive multi-interaction model AFIMM (Adaptive Fuzzy Interacting Multiple Model), optimize the design of the AFIMM motion model set, and propose a fuzzy adaptive model transition probability method; in the third layer, a resampling particle filter (Particle Filter, PF) is designed as the iterative filtering structure of each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com