Bionic mechanical palm based on netlike linkage structure
A bionic mechanical and net-like technology, applied in the field of bionic robotic palms based on a net-like linkage structure, can solve the problems of complex internal structure, high cost, and high manufacturing cost, and achieve the effects of improved reliability, easy assembly, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
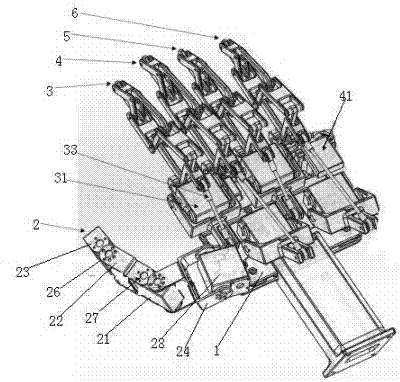
[0037] A bionic mechanical hand based on a mesh linkage structure, including a thumb 2, an index finger 3, a middle finger 4, a ring finger 5, a little finger 6, and a palm 1.
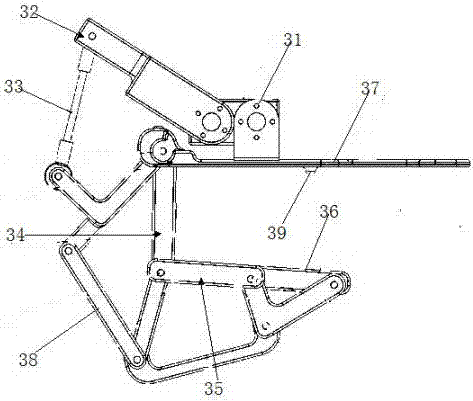
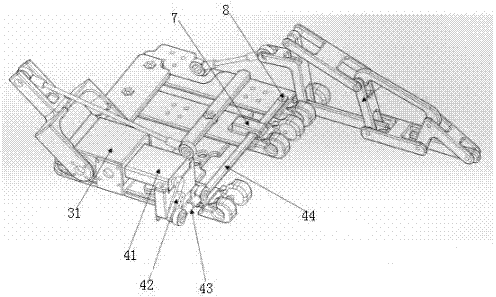
[0038] The forefinger 3 is made up of three knuckles, and the whole forefinger is in a mesh structure viewed from the side, and the whole forefinger is controlled by a servo motor 4 31 through a connecting rod 33 . After the servo motor 4 31 pushes the connecting rod 33, the knuckle 1 34 of the forefinger 3 closest to the palm 1 will be bent first. Driven to continue to wrap the obstacle, when the obstacle is touched again, the phalanx will also be automatically locked, and the last phalanx knuckle three 36 will also complete the same steps under the drive of the connecting shaft rod 33, thereby completing the obstacle All-round wrapping of objects, and can adapt to obstacles of any size.
[0039] The above-mentioned middle finger 4, ring finger 5, and little finger 6 have the same basic structure and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com