Swarm robot search method based on dynamic particle bee algorithm
A technology of honeybee algorithm and search method, which is applied in the search field of swarm robots, can solve problems such as complex structure, large size, and poor flexibility, and achieve the effects of improving search efficiency, good convergence, and speed improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0064]Inspired by the foraging behavior of bee swarms, the present invention proposes to simulate the process of bee swarm foraging for target search in the process of performing search tasks by swarm robots, that is, in an unknown environment, swarm robots use features to search for targets.
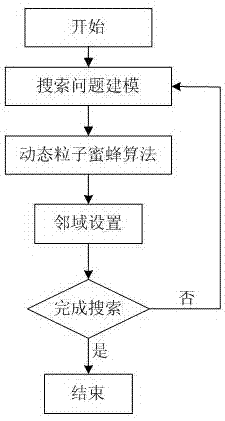
[0065] A search method for swarm robots based on dynamic particle bee algorithm, which specifically includes the following steps.
[0066] A. Modeling the search problem using a combinatorial auction approach.
[0067] Suppose a bidding set G={B of a combination auction 1 , B ,2 ,...B S}, a bid is a two-tuple B j ≤S j ,c ij >0, here the cost function c ij >0 can be regarded as the bidding price, and the cost function c ij Indicates robot R i Search target G j the price required.
[0068] when x ij = 1, it means that the robot R i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com