Control system of cable-stayed bridge cable rope crawling robot
A crawling robot and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of reduced braking capacity of electromagnetic brakes, small operating loads, unstable lines, etc., to improve operating efficiency, increase quality, The effect of reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with drawings and embodiments.
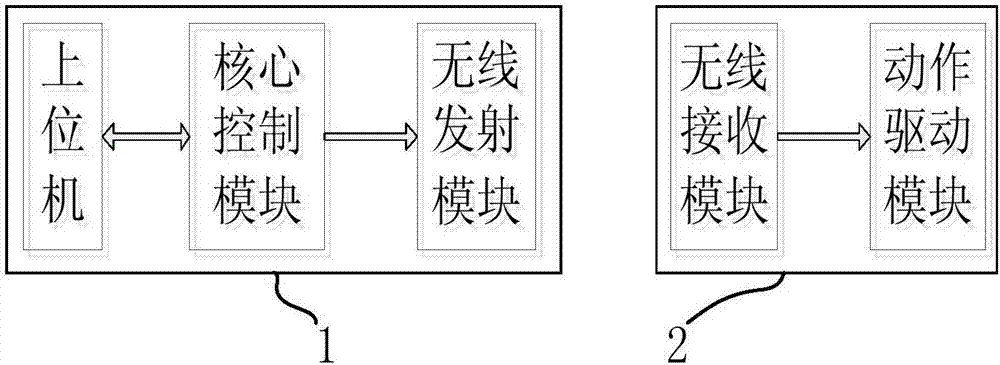
[0029] Such as figure 1 A control system for a cable-stayed bridge cable crawling robot is shown, including an instruction sending end and an instruction receiving control end, the sending end is installed in the ground control box, and the instruction receiving end is installed on the robot; the instruction sending end includes a host computer, a core control device and wireless signal transmitter module.
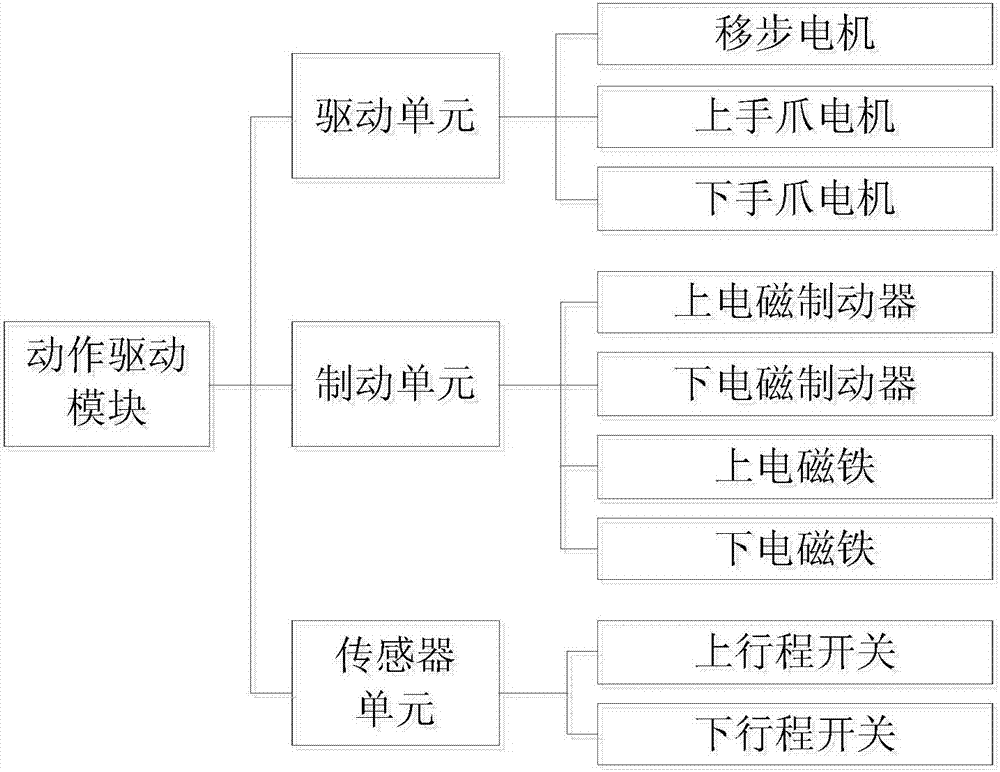
[0030] The instruction receiving control terminal includes a wireless signal receiving module and an action driving module. When the robot's working range is small, the robot directly carries a large-capacity lithium battery as a power source, which can effectively enhance the portability of the entire system. When the robot has a large working range, a portable generator is used for power supply of AC 220V, and the robot is connected to the power supply through a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com