Exoskeletal upper limb rehabilitation training robot
A technology of rehabilitation training and robotics, applied in passive exercise equipment, physical therapy, etc., can solve the problems of patients with secondary injuries to upper limbs, untrained joints, and long time consumption, so as to reduce pressure, avoid cumbersome adjustment procedures, and reduce The effect of trunk compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
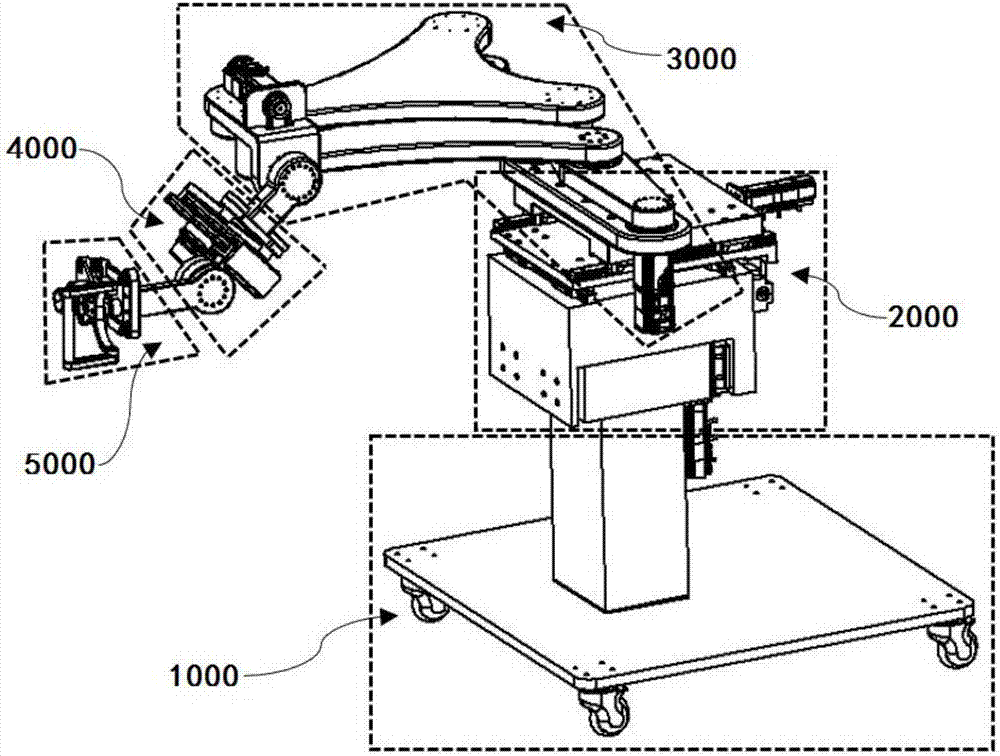
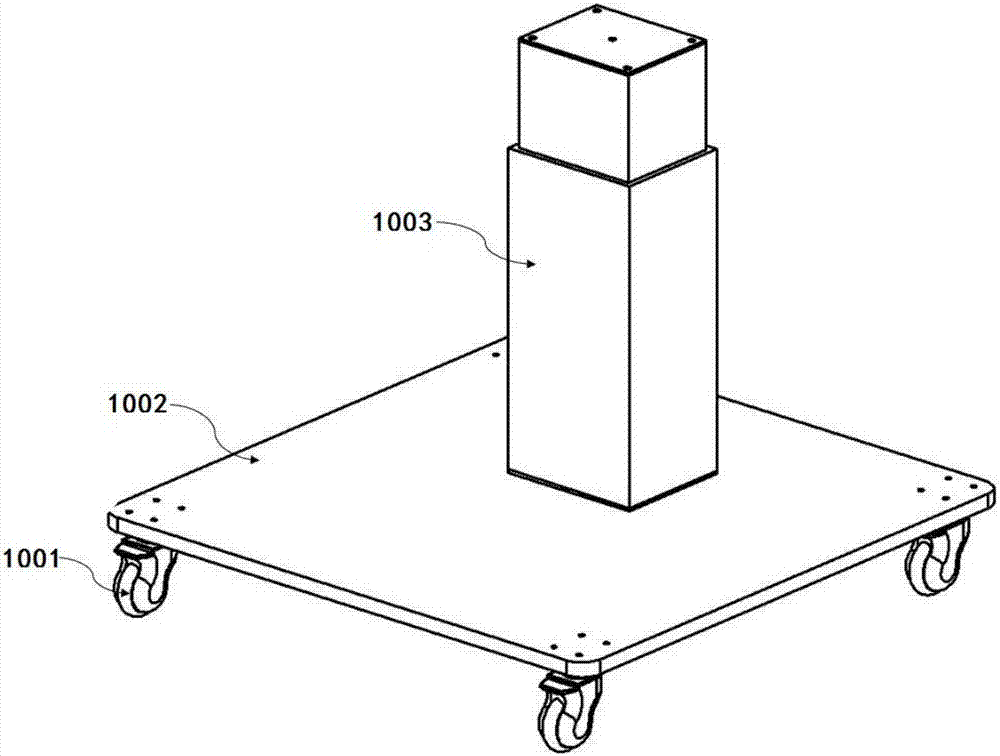
[0029] Please see attached figure 1 , attached Figure 9 to attach Figure 11 As shown, an exoskeleton type upper limb rehabilitation training robot includes a base part 1000, a shoulder girdle part 2000, a shoulder joint part 3000, an upper arm part 4000 and a forearm part 5000; the base part 1000 includes lockable casters 1001, Base base plate 1002 and electric lifting column 1003; the base base plate 1002 is used to support the entire exoskeleton upper limb rehabilitation training robot, and the lockable casters 1002 are installed on the bottom surface of the base base plate 1002 for external Movement and placement of the skeletal upper limb rehabilitation training robot; the lifting column 1003 is arranged on the base floor 1002 for adjusting the height of the exoskeleton upper limb rehabilitation training robot to adapt to patients of different he...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com