Collaborative processing method and system for intelligent robot
An intelligent robot and collaborative processing technology, applied in the field of intelligent robots, can solve difficult problems and achieve the effect of improving anthropomorphism and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0030] figure 1 It is a schematic flowchart of Example 1 of the collaborative processing method applied to intelligent robots according to the present invention, and the method in this embodiment mainly includes the following steps.
[0031] In step S110, the intelligent robot receives and parses multimodal input data.
[0032]The multi-modal input data can come from the data input by the user, or it can be the data sent by other intelligent terminals after establishing a communication connection with the intelligent robot, or it can be the data collected by the intelligent robot terminal through its own collection equipment, or Or the data sent from the cloud server. These multimodal input data mainly include text data, audio data, video data, image data, and program instructions for enabling the robot to output certain actions or execute software or hardware.
[0033] Subsequently, the received multimodal input data is analyzed, and the specific analysis result may include...
Embodiment 2
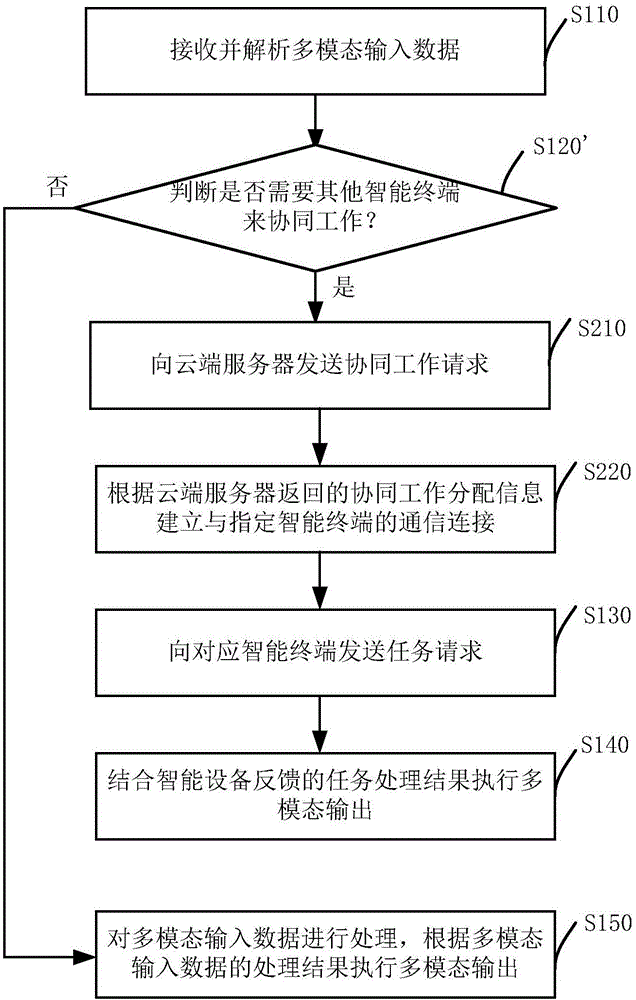
[0047] figure 2 It is a schematic flow chart of Example 2 of the collaborative processing method applied to intelligent robots of the present invention. The method of this embodiment mainly includes the following steps, wherein steps similar to those of Embodiment 1 are marked with the same symbols and will not be repeated here. For its specific content, only the distinguishing steps are described in detail.
[0048] In step S110, the intelligent robot receives and parses multimodal input data.
[0049] In step S120', it is judged according to the analysis result of the multimodal input data whether other intelligent terminals are required to work together, if the judgment result is "yes", then execute step S210, otherwise execute step S150 to process the multimodal input data , perform multimodal output based on the processing results of multimodal input data.
[0050] It should be noted that this step is different from the corresponding step in Embodiment 1. In this embo...
Embodiment 3
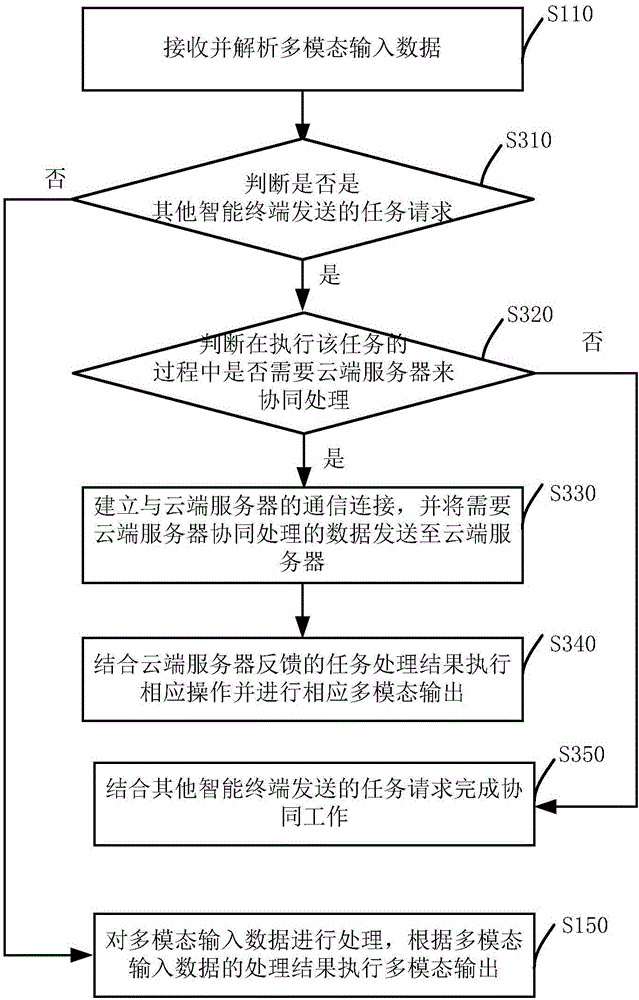
[0060] image 3 It is a schematic flowchart of Example 3 of the collaborative processing method applied to intelligent robots of the present invention. The method of this embodiment mainly includes the following steps, wherein steps similar to those of Embodiment 1 are marked with the same symbols and will not be repeated here. For its specific content, only the distinguishing steps are described in detail.
[0061] In step S110, the intelligent robot receives and parses multimodal input data.
[0062] In step S310, it is judged according to the analysis result of the multimodal input data whether it is a task request sent by other smart terminals, and if the judgment result is "yes", then step S320 is executed; otherwise, step S150 is executed for the multimodal input data deal with.
[0063] In addition to actively sending collaborative work requests, the intelligent robot in this embodiment can also serve as a collaborative terminal for other intelligent terminals to rece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com