Intelligent moving path planning method based on incomplete information condition
A moving path, intelligent technology, applied in road network navigator, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problems of unable path planning, unable to detect surrounding environment, unable to complete autonomous movement, etc. Mature technology, simple operation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
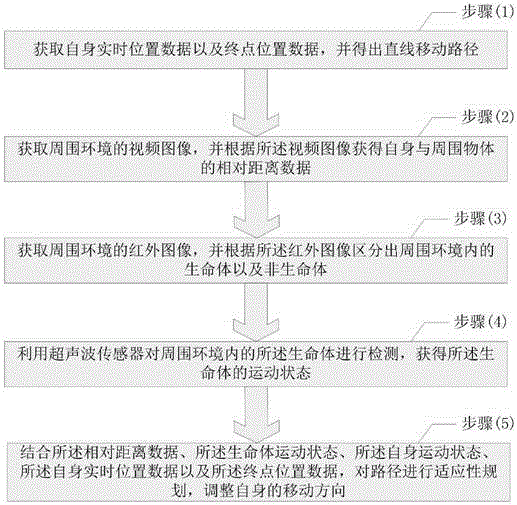
[0048] Such as figure 1 As shown, a method of intelligent mobile path planning based on incomplete information, the method includes the following steps: Step (1): Obtain real-time position data and terminal position data of itself, and obtain a straight line movement path; Step (2) : Obtain the video image of the surrounding environment, and obtain the relative distance data between itself and the surrounding objects according to the video image; Step (3): Obtain the infrared image of the surrounding environment, and distinguish the living and non-living objects in the surrounding environment according to the infrared image ; Step (4): Use the ultrasonic sensor to detect the living body in the surrounding environment, and obtain the motion state of the life body; Step (5): Combine the relative distance data, the motion state of the life body, its own motion state, its real-time position data and End point location data, adaptive planning of the path, and adjustment of its own ...
Embodiment 2
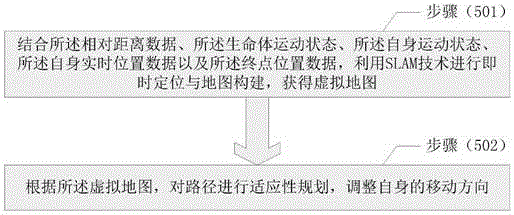
[0055] Such as figure 2 , 3 As shown, this embodiment provides a method for intelligent mobile path planning based on incomplete information. The difference from Embodiment 1 is that step (5) specifically includes: step (501): combining relative distance data, living body Motion state, own motion state, own real-time position data and terminal position data, use SLAM technology for real-time positioning and map construction, and obtain a virtual map. As a real-time environment display method, it is used as a means of real-time environment display; step (502): according to the virtual map, carry out adaptive planning on the path, and adjust the direction of movement; establish a virtual map, a On the one hand, it can control the situation of the surrounding environment in real time and on the other hand, it can transmit the virtual map to other devices for remote monitoring by other personnel.
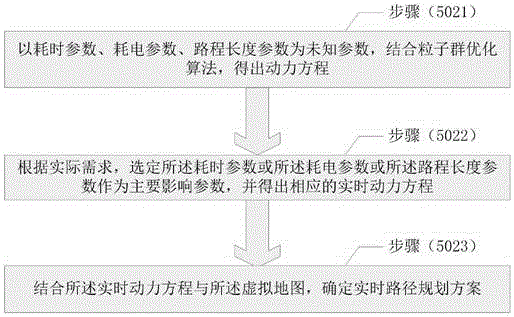
[0056] In this embodiment, step (502) specifically includes: step (5021): using ...
Embodiment 3
[0058] Such as Figure 4 , 5 As shown, this embodiment provides a method for intelligent mobile path planning based on incomplete information. The difference from Embodiments 1 and 2 is that step (2) specifically includes: Step (201): Acquire video of the surrounding environment Image; Step (202): Carry out impurity removal and filtering process to the video image, and perform analog-to-digital conversion to obtain clear video image data; Step (203): Obtain the relative distance between itself and surrounding objects according to the clear video image data Data; the acquired video image, the video image data is an analog signal, which is first processed by impurity removal and filtering to obtain relatively clear video image data. There are certain difficulties and obstacles in the data transmission and processing of the analog signal, so the impurity removal filter is then processed. The processed video image data is transformed into a digital signal through analog-to-digita...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com