Method for planning route of unmanned surface vehicle based on universal gravitation search
A technology of universal gravitation and route planning, applied in the field of path search, can solve problems such as long search time and easy to fall into local optimal solutions, and achieve the effects of reducing time spent, improving autonomy, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
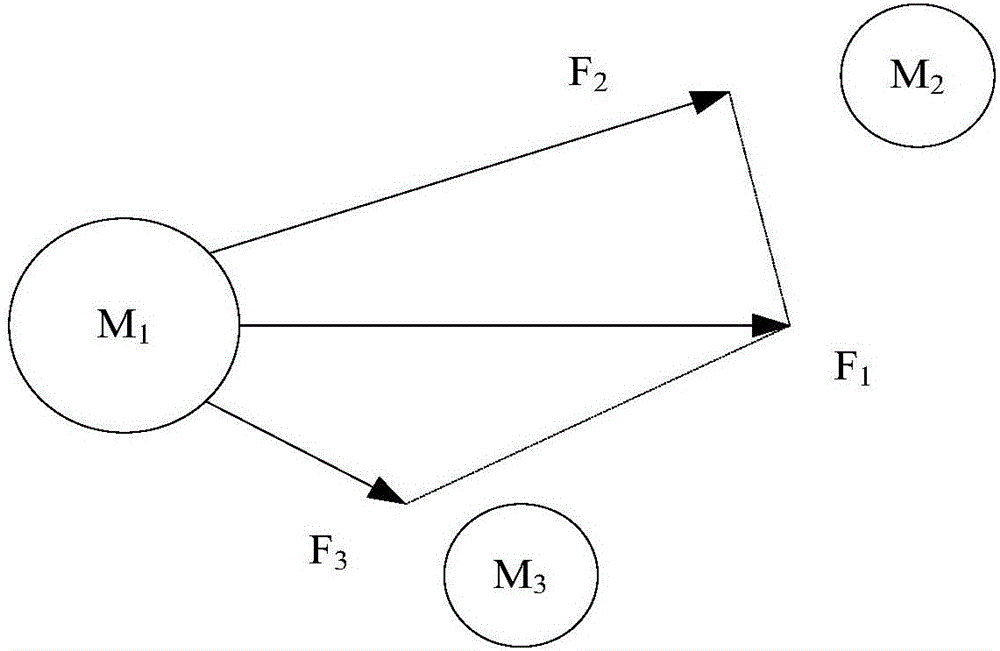
[0035] The basic gravitational search algorithm is a heuristic algorithm based on Newton's law and the law of motion. This algorithm mainly improves the exploration and operation capabilities based on the rules of gravity. Gravity (GSA) is one of the four basic forces in nature. Particles are constantly approaching each other under the action of gravity, and particles will attract each other in nature. According to Newton's gravitational formula (1), it can be seen that the magnitude of the force between particles is proportional to their mass, and inversely proportional to the square of the Euclidean distance between them:
[0036]
[0037] Among them, F represents the size of universal gravitation, G represents the gravitational constant, and M 1 and M 2 Represent the inertial masses of the two particles, and R represents the Euclidean distance between the two particles. It can be seen that heavier particles have stronger attraction to other particles, such as figure 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com