Fault tolerant control method of four-rotor-wing aircraft based on optimal sliding mode
A four-rotor aircraft, fault-tolerant control technology, applied in the direction of simulator, program control, computer control, etc., can solve the problem of failure to fully consider the actual system time lag, uncertainty, failure, flight control system is difficult to have a good control effect, Lack of artificial real-time manipulation and other issues, to achieve better control effects, improve flight safety, and convenient application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further explained below in conjunction with the accompanying drawings.
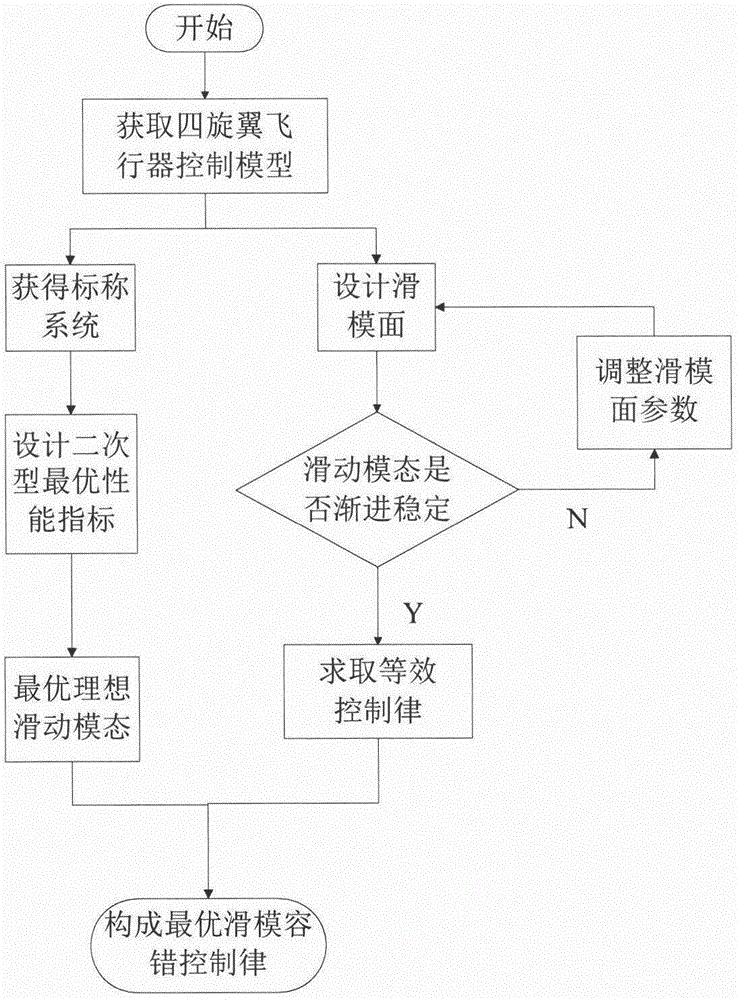
[0061] like figure 1 As shown, considering the time lag and actuator failure of the quadrotor aircraft, combined with the optimal control and sliding mode control, an optimal fault-tolerant control method is proposed, so that the aircraft can continue to fly safely after the actuator failure occurs, and ensure a good flying qualities. According to the obtained model parameters of the aircraft, an integral sliding mode surface with time-delay compensation is designed to eliminate the influence of time-delay, and the quadratic optimal performance index is designed for the nominal system to obtain the optimal ideal sliding mode, and then Design the corresponding sliding mode control law, and finally constitute the optimal fault-tolerant controller. Including the following specific steps:
[0062] Step 1) establishes the mathematical model of quadrotor aircraft:
[006...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com