End effector for fruit and vegetable picking robot
A technology of end effector and picking robot, which is applied in the field of machinery, can solve the problems of inability to realize fruit picking operations, unfavorable storage and grasping accuracy, and inability to cope with fruit picking, so as to achieve good promotion value, increase picking speed, and low cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The specific implementation of the present invention will be described in further detail below with reference to the accompanying drawings.
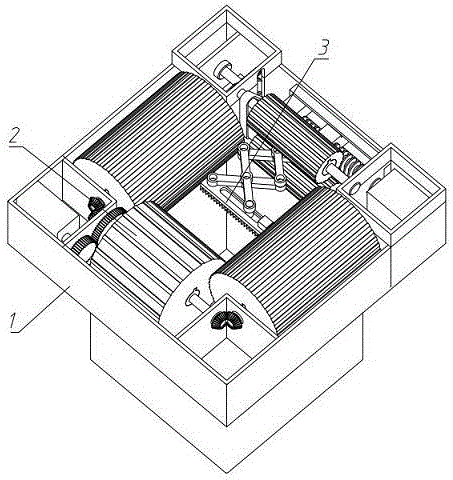
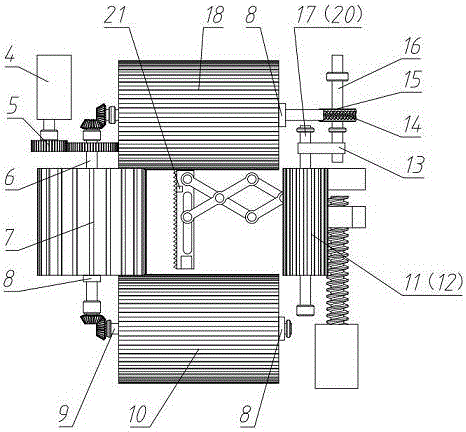
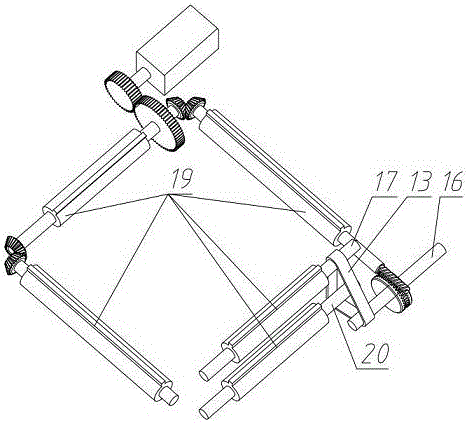
[0014] Such as figure 1 , As shown in Figure 2(a), the end effector consists of four parts: grasping system, cutting system, sensor control system, and shell.
[0015] The grabbing system (2) is mainly composed of grabbing system motor (4), spur gear (5), straight bevel gear shaft 1 (6), rubber roller 1 (7), and straight bevel gear shaft 2 (9) , rubber roller 2 (10), rubber roller 3 (11), rubber roller 4 (12), toothed chain (13), worm (14), turbine (15), turbine shaft (16), small roller shaft 1 ( 17), rubber roller 5 (18), roller connecting sleeve (19), small roller shaft 2 (20); spur gear (5) and straight bevel gear installed on the shaft of the grabbing system motor (4) Shaft 1 (6) meshes, straight bevel gear shaft 1 (6) meshes with straight bevel gear shaft 2 (9), and at the same time, the straight bevel gear meshes with the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com