Wearable intelligent lower limb rehabilitation device and control method
A rehabilitation device and lower limb technology, which is applied in the research field of medical auxiliary treatment, can solve the problems that patients cannot intuitively understand the operation of the equipment, cannot detect the patient's physical condition, and the control accuracy is not high, and achieves a beautiful overall appearance, less noise, and high control accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them.
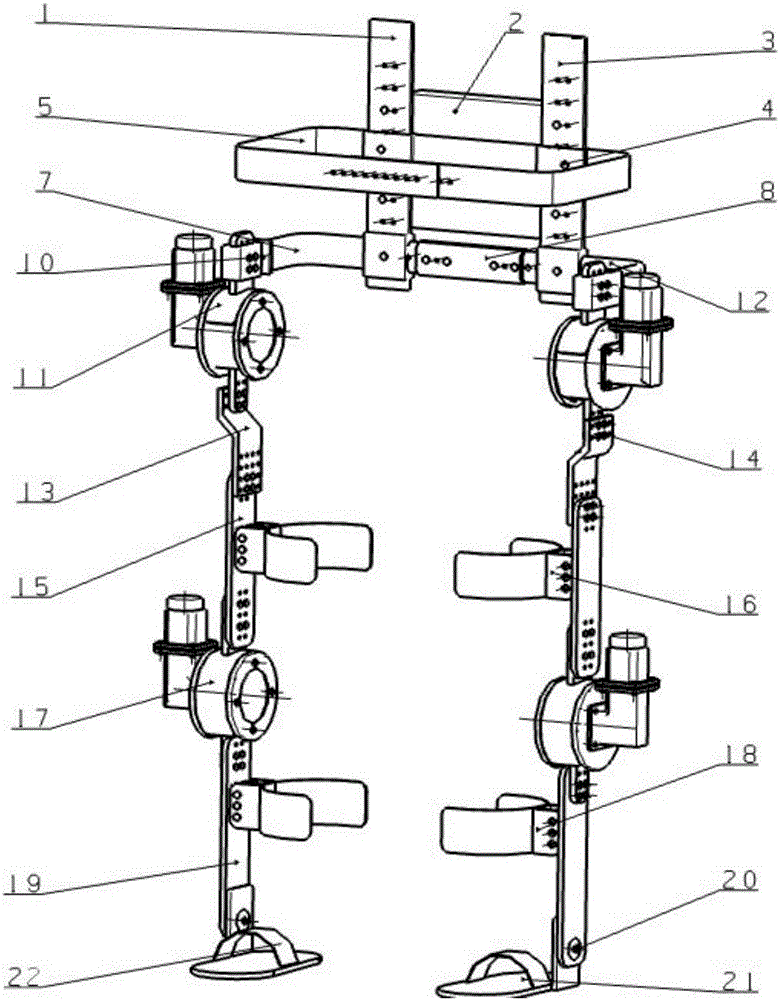
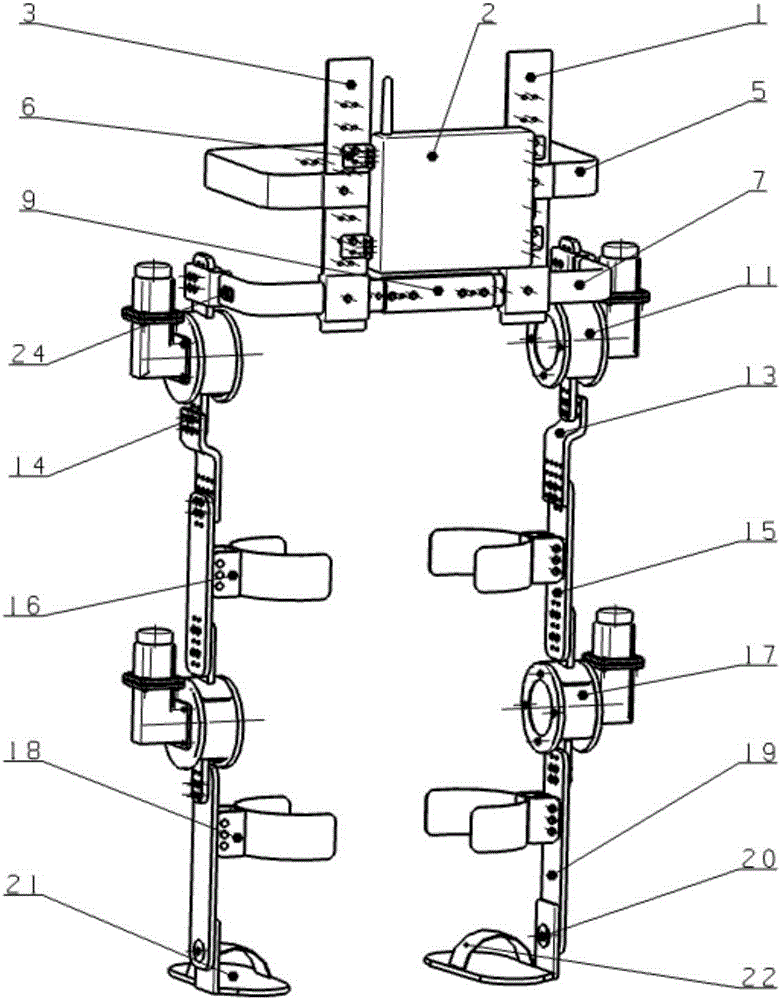
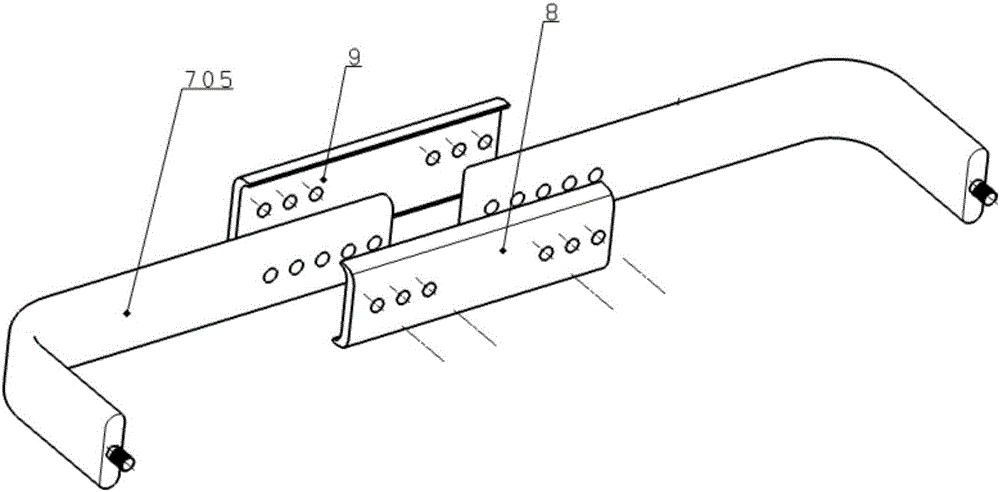
[0042] In the example of the present invention, combined with the attached figure 1 , 2 , 3 and 4, the wearable intelligent lower limb rehabilitation device is composed of a waist mechanism, a back mechanism, a driving mechanism and an actuator, wherein the right waist main support frame 7 and the left waist main support frame 12 have the same mechanism, and one end is "G ” type structure 701, the other end is fixed by the front side waist adjustment part 8 and the rear side waist adjustment part 9; the six-axis motion processing component 24 is located outside the main waist support frame 12 on the left side, and the emergency button 23 is located on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com